Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und Solarschiffe (III) 2008 - 2009
2008
Ein Tragflächen-Jet-Ski ohne Negativeinflüsse auf die Umwelt wird
von den Designern Matt De Bellefeuille und Robert Vandenham entworfen.
Der elektrische Foiljet MR1 – es
handelt sich um die Abschlußarbeit der beiden – bietet mit seinem 15
kW / 48 V Elektromotor ein schnelles und weitgehend geräuschloses Wassermotorrad-Erlebnis
über rund 3 Stunden, wobei die Ladezeit nur 20 Minuten betragen soll.
Das Design ist bislang jedoch noch nicht umgesetzt worden.

Auf der Messe ‚Boot Düsseldorf’ im Januar 2008 stellt das österreichische Unternehmen Steyr Motoren ein gemeinsam mit der Frauscher Bootswerft in Gmunden entwickelte Hybridsystem für Boote und Yachten vor. Es gilt als das erste in Serie produzierte System weltweit. Bis zu einer Geschwindigkeit von 5 Knoten fährt das Boot elektrisch, danach schaltet sich der Diesel dazu.
Die seit 1927 bestehende Bootswerft bietet außerdem verschiedene Hybrid- und Elektroboote an, angefangen von dem Modell 560 Valencia (5,60 m lang, 1,80 m breit, ab 630 kg Gewicht, 4,3 kW Motor, ab 30.400 € netto) bis zum Modell 750 St. Tropez (5,52 m lang, 2,25 m breit, ab 1.400 kg Gewicht, 25 o. 37 kW Motor, keine Preisangabe).
Im Februar 2008 stellt die US-Firma Kayacht ein elektrisch betriebenes Kayak vor, das sich wegen seiner Geräuschfreiheit besonders gut zur Vogelbeobachtung, zum Angeln oder zur Fotografie eignet. Der Elektromotor-Set läßt sich mit fast allen Kayakhüllen kombinieren, während der Minnkota Motor selbst 5 Vorwärts- und 3 Rückwärtsgeschwindigkeiten und für 10 Minuten eine Höchstgeschwindigkeit von knapp 10 km/h erlaubt. Bei geringerer Geschwindigkeit und mit Paddelunterstützung läßt sich die Zeitdauer auf mehrere Stunden strecken.

Das elektrische Antriebssystem des MotorYak besitzt 11,3 kg VRSLA/AGM-Batterien und einen Bow Thruster E-Motor. Es ist das Ergebnis von sechs Jahren Arbeit durch Paul Howey und läßt sich in wenigen Stunden installieren. Später kommt mit dem Kayacht Touring 130 ein Komplettsystem dazu, das (ohne Batterien und Ladegerät) für 1.395 $ angeboten wird.
Ebenfalls im Februar 2008 verbreiten sich Meldungen über einen völlig neuartigen Antrieb für Schiffe, der im Grunde auch naheliegend ist: die Wellenenergie. Die SUNTORY Mermaid II wird durch Yutaka Terao von der Tokai University in Japan entwickelt und von der Tsuneishi Shipbuilding Company gebaut. An der Vorderseite des 3 t schweren, 9 m langen und 3,5 m breiten Bootes befinden sich zwei Flossen, die von den Wellen auf und ab bewegt werden und über einen ausgeklügelten Federmechanismus die Energie für den Vortrieb liefern, ähnlich einer Delphinflosse. Zur Unterstützung des Antriebs besitzt das Schiff Solarpaneele.
Mitte Mai 2008 startet der ‚Solar-Seefahrer’ Kenichi Horie zu der zweieinhalb Monate dauernden und 7.000 km langen Jungfernfahrt von Hawaii nach Japan, wo er Ende Juni eintrifft. Leider gibt es auch hier keine weiteren Informationen über diese Fahrt ... außer in japanisch.

Kayacht.com, der Online-Shop der seit 2003 bestehenden Firma PWC Sports / Electric Watercraft in Tinley Park, Illinois, bietet Anfang 2008 einen zweisitzigen, elektrischen betriebenen Kayak-Bausatz an. Das Polyethylen-Boot, das unter dem Namen Johnson Escape Touring Boat angeboten wird, ist knapp 300 cm lang, 110 cm breit und besitzt sogar eine elektrische Bilgenpumpe. Eine dritte Person kann mitfahren, muß sich allerdings auf eine der Bootsenden setzen.
Die Fahrzeit mit einer vollgeladenen Standard-Autobatterie beträgt 5 – 8 Stunden bei einer Geschwindigkeit von 5 – 6,5 km/h, das Bordnetz läuft dementsprechend auch mit 12 V. Für den Bausatz werden 295 $ in Rechnung gestellt, weitere 169 $ kostet der Elektro- und Hardware-Set. Fertig montiert kostet das Boot (ohne Batterien oder Ladegerät) 1.395 $.

Das Konzept eines eigenwilligen Hybrid-Bootes, das mit Pedal- und Solarenergie angetrieben werden kann, stellt der Designer Jonathan Mahieddine im März 2008 vor. In dem runden Kern des Katamarans haben vier Personen Platz, während das schattenspendende Dach gleichzeitig mit Solarzellen bedeckt ist.
Der Entwurf für eine der ersten Megayachten mit Diesel-elektrischem Hybridantrieb wird im April 2008 von dem australischen Yacht-Designer Scott Blee vorgestellt. Das Luxus-Schiff namens Sabdes 50M soll knapp 42 m lang werden, sein Dieselmotor lädt eine Batteriebank nach, welche die Elektromotoren versorgt, und innen sorgen energiesparende LEDs für das Licht. Die anvisierte Geschwindigkeit beträgt rund 46 km/h (ca. 25 Knoten).

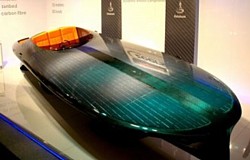
Eine weitere Premiere bildet das erste Solar-Rennboot, die mit 80 kW angetriebene Czeers Mk1 von David Czapp und Nils Beers (daher der Name) aus Delft. Das ökologisch unbedenkliche Rennboot aus Karbonfasern, das erstmals im April 2008 präsentiert wird, ist komplett mit einer 14 m2 großen Schicht Solarzellen überzogen und erreicht mit seinen Elektromotor eine Höchstgeschwindigkeit von etwa 55 km/h (ca. 30 Knoten). Als Grundlage der Entwicklung diente ein Boot, mit dem die Entwickler erfolgreich am Friesischen Solarboot-Wettbewerb 2006 teilgenommen hatten. Ein Preis wird nicht mitgeteilt.
Im Mai 2008 erscheinen in der Presse Fotos der Solis von Patrick Biaggini und Thomas Martin-Chave. Das Schiff wird als eines der ersten Solarboote, das meerestauglich ist, angepriesen.
Das in Marseille von der Firma Bleu evasion konstruierte Boot hat ein Solardach von 5 m2, und die 600 kg Batterien an Bord erlauben ihm eine Reichweite von 70 km bzw. eine Fahrzeit von 9 Stunden.
Die amerikanischen Unternehmen General Electric (GE) und C-MAR, eine texanische Fachfirma für maritime Ingenieurleistungen geben im Mai 2008 bekannt, daß sie an hybriden diesel-elektrischen Schleppern arbeiten, die rund 35 % Brennstoff und bis zu 80 % Emissionen einsparen. Die Schiffsschraube wird elektrisch angetrieben, während der Dieselgenerator den hierfür benötigten Strom produziert und die Batterien nachlädt. Die für den Hafeneinsatz gedachten Boote sollen bereits in zwei Jahren kommerziell angeboten werden. Einen ähnlichen Plan hatte schon 2007 die Firma Foss Maritime aus Seattle angekündigt, die dann den weltweit ersten Hybrid-Schlepper mit 5.000 PS entwickelt hat, der in den Häfen von Los Angeles und Long Beach zum Einsatz kommt.

Der globale Schiffsverkehr verursacht immerhin rund doppelt soviel Abgase wie der Luftverkehr, und die ersten Länder arbeiten inzwischen an Emissions-Regelungen, um diese Quelle intensiver Luftverschmutzung zu verringern. In den USA sind etwa 4.000 Schlepper im Einsatz, die die meiste Zeit im Leerlauf verbringen, um dann kurzzeitig gewaltige Zug- oder Druckleistungen zu vollbringen.
In Teilen der akademischen Welt Deutschlands gilt das Solarboot von Prof. Christian Schaffrin und Studierenden der Hochschule Konstanz (HTWG) als ,erstes Solarboot der Welt’ (s.o.). Die Korona ist vor 20 Jahren konstruiert worden und soll nun nach einer Generalüberholung und einem technischen Update am längsten Solarbootrennen der Welt teilnehmen: dem Frisian Solar Challenge 2008. Dieser Wettbewerb, der erstmals 2006 ausgetragen wurde, wird in Holland veranstaltet und läuft vom 22. bis zum 28. Juni. Die teilnehmenden selbstgebauten Solarboote wetteifern auf sechs Etappen und über eine Distanz von insgesamt 220 km um die schnellsten Zeiten.
Im Juni 2008 gibt die Firma Island Pilot LLC bekannt, daß sie auf der Fort Lauderdale International Boat Show Ende Oktober das ‚weltweit erste’ Null-Emissions-Boot vorstellen wird. Das gut 12 m lange Modell Island Pilot DSe Hybrid 12m ist ein Diesel/Elektro-Hybrid, dessen 20 kWh Batterien durch ein 6,8 kW Solarpaneel sowie zwei 1,5 kW Windrotoren nachgeladen werden. Mit 6 kW macht das Boot 6 Knoten, während durch das Hinzuschalten des 75 PS Diesels bis zu 13 Knoten erreicht werden können. Die Propeller werden von zwei 36 PS Elektromotoren angetrieben. Die mögliche Fahrzeit mit Sonne, Wind und Batterie beträgt 4 Stunden. Als Preis für das auch innen luxuriös ausgestattete Doppelrumpf-Boot werden 600.000 $ genannt.

Für Überwachungsaufgaben und militärische Einsätze entwickelt die Firma Macroswiss für die US-Army eine ferngesteuerte Unterwasserdrohne namens Hydrobot, an deren aus dem Wasser ragenden Spitze eine künstliche Möwe befestigt ist – in der sich die Kamera befindet. Die im Juli 2008 in den Blogs erscheinende Technologie erwähne ich hier, weil auch diese Geräte elektrisch angetrieben werden.
Bei der Abschluß-Ausstellung des Royal College of Art in London im Juli 2008 präsentiert Kristian Gonzalez ein von Jacques Cousteau inspiriertes Bootsdesign namens Tortuga (span. Schildkröte), bei dem es sich um ein Tragflächen-Segelboot mit zwei starren Segeln, Solarpanelen und Elektromotor handelt. Weitere Details sind noch nicht festgelegt.

Die Firma Yacht Concept Solartechnology wird Anfang 1999 in Allensbach am Bodensee als Familienbetrieb von Jedrzej Gawlowski gegründet. Neben dem Vertrieb von Yachten macht sich das kreative Unternehmen auch mit der Bootselektrifizierung und Bootsentwicklung einen Namen, z.B. mit der Planung und dem Bau der kompletten Bord- und Antriebstechnik der Solarbootserien RA29 – RA33 der Fa. Kopf AG (s.o.). Außerdem werden verschiedene Solarwanderboote entwickelt. 2006 wird der Prototyp des Solar-Wanderboot YC-840SE fertiggestellt, auf den Namen Swan getauft und das erste Mal auf der Messe Boot Düsseldorf vorgestellt. Realisiert wurde das Projekt mit der Unterstützung der Deutschen Bundesstiftung für Umwelt (DBU).

Das 8,66 m lange, 2,49 m breite und 2,60 m hohe Boot ermöglicht bis zu sechs Passagieren ohne Tankstopp zu reisen, da die zwei Gleichstrommotoren des Antriebs von einer leistungsstarken Photovoltaikanlage auf dem begehbaren Sonnendeck mit Energie versorgt werden. Überschüssiger Strom wird in zwei Gel-Batteriebänken gespeichert, die auch bei bedecktem Himmel für bis zu 15 Stunden die Weiterfahrt mit einer Reisegeschwindigkeit von knapp 4 Knoten erlauben. Während der Liegezeit sorgt zusätzlich ein Windgenerator auf dem Heck für Strom. Das nur 2 t schwere Hausboot mit Toilette, Dusche und Bordküche ist einfach auf einem Trailer zu transportieren und kann so als ‚Amphibien-Caravan’ auch an Land als Unterkunft dienen. Das Schiff eignet sich aber auch als Kleinfähre, Laborschiff oder schwimmende Bildungsstätte.
Im Juli 2008 stellt die inzwischen in Singen residierende Firma nun das weiterentwickelte und größere Solar-Wanderboot Swan II vor, das durch seinen bis 5 kW leistenden Solargenerator vollkommen energieautark ist. Es gib eine 1.000 Ah/48 V Antriebsbatterie und eine 200 Ah/24 V Bordbatterie. Der Antrieb des 11,60 m langen und 3,50 m breiten Bootes kann mit 6 bis 15 kW Leistung konfiguriert werden, wobei für eine ökonomische Fahrt mit 6 km/h aber nur 2 kW Leistung erforderlich sind. Als Spitzengeschwindigkeit sind dagegen 14 km/h drin. Zugelassen ist das Solarschiff für zwölf Personen. Eine Solar-Fähre für 30 Personen wird im September zugelassen, und projektiert werden ein Solar-Segelboot, ein Solar-Motorboot, ein Solar-Hausboot Orca sowie eine Solar-Katamaran-Fähre für 100 Personen.
Tim Clissold aus Warkworth auf Neuseeland entwickelt diverse Segel- und Elektro-Katamarane und -Trimarane. Neben vielen Designs kann er 2008 den 6,8 m langen, 2,5 m breiten und 900 kg schweren Elektrotrimaran EloTri 701/Solar Star vorstellen, der mit einem 3 kW Motor, 8 Batterien und 3 x 175 W Solarpanelen ausgestattet ist und eine Fahrtgeschwindigkeit von 5 Konten erreicht. Das Boot hat 6 Sitzplätze, Toilette und vorn eine komfortable V-Koje.
Das Solardach wird elektrisch über das Cockpit gehoben und dient als Sonnenschutz An kühleren Tagen kann um das Cockpit eine transparente PVC-Folie befestigt werden. Bei geschlossenem Dach werden Cockpit und Kabine vor den Elementen und/oder diebischen Fingern geschützt, außerdem erleichtert es den Transport auf der Straße.

Die Celebrity Solstice, das mit 122.000 Tonnen bis dato größte jemals in Deutschland gebaute Kreuzfahrtschiff, sticht im November 2008 in Fort Lauderdale zur ersten Reisesaison in See. Das Schiff der Meyer Werft ist 315 m lang, besitzt 13 Decks und 1.426 Kabinen für 2.850 Passagiere. Die Crew besteht aus rund 1.250 Personen.
Von außen unterscheidet sich das schneeweiße Flaggschiff der US-Reederei Celebrity Cruises nicht wesentlich von anderen Mega-Linern, doch es hat zahlreiche Systeme an Bord, die das Schiff umweltfreundlicher machen sollen. So wurde die Beleuchtung des Kreuzfahrtschiffs komplett auf LEDs umgerüstet, im Maschinenraum sorgen vier Hybrid-Motoren für Vortrieb, auf dem Oberdeck sind mehrere Solaranlagen verbaut und für den anfallenden Müll wurde ein umfangreiches Recycling-System installiert. Für den rund 1.400 m2 großen Rasen auf dem Oberdeck gibt es einen Regenwassertank, aus dem die Grünfläche mit Wasser versorgt wird.
Im September 2008 meldet die Presse, daß sich die beiden japanischen Unternehmen Nippon Yusen KK (NYK Line) and Nippon Oil Corp. den weltweit ersten Frachter bauen, dessen Strombedarf teilweise durch Solarenergie versorgt wird. Auf der 60.213 t schweren und 200 m langen Auriga Leader der Toyota Motor Corp. werden 328 Solarpaneele mit einer Leistung von 40 kW installiert, die etwa 10 % des bordeigenen Strombedarfs decken können (andere Quellen: 6,5 %). Sinnvoll ist dies besonders bei Andockzeiten, um wenigstens dann die Schadstoff-emittierenden Schiffsdiesel abschalten zu können. Im Hafen verbraucht das ankernde Schiff immerhin noch ca. 400 kW (während die sogenannten Super-Öltanker alleine zum Abpumpen des Rohstoffes etwa 8 MW benötigen!).
Im Grunde ist diese Umsetzung nur ein armseliger Tropfen auf den heißen Stein – und das bei einem Kostenaufwand von immerhin 1,68 Mio. $! Besonders abwegig ist jedoch, daß dieses Schiff ausgerechnet für den Transport japanischer Autos in die USA eingesetzt werden soll – pro Fahrt 6.400 Stück. Sollte es sich dabei allerdings um Elektroautos handeln, würde ich der Sache noch etwas abgewinnen können... (tatsächlich wird später bekannt, daß mit dem Schiff Toyota Prius Hybridautos transportiert werden). Kurz von Weihnachten 2008 startet die Auriga Leader von Kobe aus zu ihrer Jungfernfahrt.

Die Siemens AG präsentiert im September 2008 eine neue, flexible und energiesparende Hybridantriebslösung im Leistungsbereich 100 kW bis 800 kW. Das kompakte ‚Siship-Eco Prop-System’ ist das ‚erste System weltweit’, das die Vorzüge von Diesel-Elektro-Hybridantriebssystemen auch für kleinere Schiffe bereitstellt.
Ebenfalls im September 2008 wird in Lübeck Deutschlands erste Landstromversorgung für Handelsschiffe in Betrieb genommen, wodurch diese im Hafen ihren Strom über das örtliche Netz beziehen, statt ihn schadstoffreich mit Dieselaggregaten zu produzieren. Herzstück der Siemens-Landstromversorgungen ‚Siharbor’ ist das Siplink-System, das erstmals eine elektrische Verbindung von Schiffs- und Landnetz erlaubt, auch wenn die entsprechenden Frequenzen unterschiedlich sind (50 bzw. 60 Hz).
Im Oktober 2008 einigt sich das Marine Environment Protection Committee (MEPC) der International Maritime Organization (IMO) in London auf seiner 58. Sitzung auf strengere Standards für die Abgase von Schiffsdieseln. Von 2010 an darf der Treibstoff z.B. nur noch 1 % Schwefel enthalten, und ab 2015 sogar nur noch 0,1 %. Allerdings gelten die Grenzwerte nur für einige Küstenregionen und Binnenmeere. Für die hohe See gelten laxere Werte, die aber ebenfalls verschärft wurden. In Sachen CO2-Emissionen wurden jedoch keine Beschlüsse gefaßt, außer daß man sich darauf einigte, weiter zu diskutieren...
Im November 2008 melden die Blogs das Projekt GOLDFISH, bei dem es sich um das weltweit erste solar betriebene Unterseeboot handelt, welches seine Energie von einer schwimmenden Solarplattform bezieht. Ort des Geschehens soll der Schweizer Thunersee werden. Das Projekt wird von dem Schweizer Energieunternehmen BKW initiiert und soll einen innovativen Beitrag zur nachhaltigen Energieversorgung leisten. Eine Machbarkeitsstudie hatte im Juni bestätigt, daß das Projekt technisch realisierbar und bewilligungsfähig ist. Auf der EXPO 2008 in Zaragoza wird es im Schweizer Pavillon präsentiert.
Ein Solarpendelboot bringt die Passagiere vom Ausgangspunkt am Ufer zur schwimmenden Solarplattform, von wo aus die Tauchfahrten stattfinden. Die Solarplattform soll einerseits als Ladestation für das Solar U-Boot und andererseits als mobiles Kraftwerk für die Energieversorgung von Veranstaltungen am Seeufer dienen. Sie besteht – ähnlich einer Seerose – aus einem zentralen Element mit einem Zelt und fünf ringsum angeordneten, mit Solarpanelen bestückten Satelliten.

GOLDFISH (Grafik)
Das Solar U-Boot soll auf einem adaptierten, kommerziell erhältlichen Unterseeboot mit einer maximalen Tauchtiefe von 300 m und einer Passagieranzahl von 24 Personen basieren. Näher ins Auge gefaßt werden die Modelle Marlin und Nomad der Firma U.S. Submarines Ltd., einem erfahrenen Hersteller von Tourismus-U-Booten, über den ich weiter unten noch berichten werde.
Zur Realisierung des Projektes GOLDFISH besteht allerdings ein Investitionsbedarf von rund 10 Mio. Schweizer Franken. Mit diesem Betrag sollten das Boot und seine 250 kW Solarplattform bis 2011 eigentlich fertiggestellt werden... was sich dann aber verzögert.
Einen ebenso innovativen Ansatz bildet der sehr anspruchsvolle Plan der Österreichischen Gesellschaft für innovative Computerwissenschaften in Wien, ein vollautomatisches und per Linux computergesteuertes Solar-Segelboot selbständig über eine Distanz von 7.500 km über den Atlantik zu schicken.

Die 3,75 m lange und 300 kg schwere ASV Roboat hatte bereits im Mai des Jahres als erfolgreich an einem Wettbewerb auf dem Neusiedler See in Österreich teilgenommen. Das mit diversen Sensoren ausgestattete Boot hat einen Energieverbrauch von durchschnittlich 500 W und wird mittels einem 1,5 m2 großen Solarpaneel (285 W) sowie einer Methanol-Brennstoffzelle (65 W) mit Energie versorgt, wobei der Strom in zwei Bleibatterien gespeichert wird (2 x 230 Ah). Im Juli 2009 steht eine Teilnahme am Worls Robotic Sailing Championship in Portugal an.
Ende 2008 stellt Torqeedo auf der New York National Boat Show einen neuen und sehr leichten elektrischen Außenbordmotor Base Travel 401 vor, dessen 12 V Lithium-Magnesium-Batterien eine Fahrzeit von einer Stunde erlauben. Zum Nachladen lassen sich die Batterien entnehmen.
Die Firma Scout Boats stellt ihrerseits das erste, industriell gefertigte Fiberglasboot vor, das von einem Hybridsystem angetrieben wird – einer Kombination aus einem 20 PS Yamaha-Außenbordmotor sowie zwei 36 V Lenco Elektromotoren.

Hornblower Hybrid
Das für Hobbyfischer gedachte und 4,40 m lange Modell 145 Hybrid, das innerhalb von 8 Monaten entwickelt wurde, hat drei Batterien an Bord, die eine Fahrzeit von 8 Stunden bei einer Höchstgeschwindigkeit von 13 km/h ermöglichen. Die Ladezeit beträgt 3 Stunden, der Preis 17,121 $. Scout Boats arbeiten außerdem an einem knapp 5 m langen Boot, das eine Geschwindigkeit von 32 km/h erreichen soll.
Im Dezember 2008 wird in San Francisco ein noch wesentlich größeres und 1.400 PS starkes Hybrid-Schiff vorgestellt, das ab April 2009 pro Fahrt bis zu 149 Touristen auf die Inseln Alcatraz und Angel Island brint. Der Veranstalter Hornblower Cruises & Events hatte ein eigenes Team von Ingenieuren und Unternehmern beauftragt, ein passendes Schiff nachzurüsten, was etwa 4 Mio. $ gekostet hat. Es ist ein insgesamt sehr interessantes Projekt das eine nähere Betrachtung lohnenswert macht, da auch noch diverse andere nachhaltige Elemente zum Einsatz kommen.

Hornblower Hybrid
Die 20 m lange Katamaran-Fähre San Francisco Hornblower Hybrid nutzt neben ihrem Dieselmotor auch den Wind und die Sonne. An Deck sind zusätzlich zu einem 1,2 kW PV-Paneel auch noch zwei Senkrechtachser von jeweils 3 m Höhe installiert, was zusammen immerhin so viel Strom erzeugt, daß damit die LED-Beleuchtung, die Navigationsanlage und andere elektronische Geräte versorgt werden können.
Energieüberschüsse werden in zwei 380 V Batteriebänken gespeichert, die in den beiden Schwimmern als Ballast fungieren und jeweils über 1 t wiegen. Die Ladezeit beträgt 5 h, und die Akkus sind in der Lage, das Hybridschiff im alleinigen Elektrobetrieb auf 7 Knoten zu beschleunigen.
Im Herbst 2009 werden die beiden Rotoren vom Modell Aeroturbine der Firma Aerotecture (s.u. Neue Desings 2003) durch spiralige 2,5 kW Savonius-Rotoren aus versteiftem Aluminium der Firma Helix Wind ausgetauscht.
Im Dezember 2009 kündigt das Unternehmen an, Ende 2010 eine zweite (umgebaute) Hybridfähre in Dienst nehmen zu wollen, bei der auch Wasserstoff-Brennstoffzellen zum Einsatz kommen sollen (s.u.). Mit dem Bau sei bereits begonnen worden.

2008 nimmt die in Florida beheimatete Firma U.S. Submarines Ltd. (US SUBS) ihr neues Modell Discovery 1000 in Betrieb, das als Untersee-Beiboot für Yachten gedacht ist, die schon Boote und Hubschrauber an Bord haben. Das luxuriöse Sport-U-Boot gibt es in Größen für 2 – 10 Personen, die Steuerung erfolgt digital mittels Joystick und einem animierten Bildschirm.
Angetrieben von einem 15 kW Elektromotor mit 2 vertikalen und 2 seitlichen Triebwerken sowie einem 75 cm Propeller ist die Discovery 1000 in der Lage bis in eine maximale Tiefe von 305 m (1.000 Fuß) zu tauchen, hat eine Reichweite von 56 nautischen Meilen und fährt unter Wasser bis zu 28 Stunden lang mit 2 Knoten, bzw. knapp 3 Stunden mit 5 Knoten. Für höhere Geschwindigkeiten kann das U-Boot mit einem 40 kW Dieselmotor mit hydrostatischem Antrieb ausgestattet werden.
2009
Durch persönlichen Kontakt erfahre ich Anfang 2009 von dem Solarwave-Projekt, das die Journalisten, Fotografen und Segler Heike Patzelt und Mag. Michael Köhler aus Klagenfurt initiiert haben. Mit beteiligt ist der Verein ‚Solarwave – österreichische Gesellschaft für alternative Energiekonzepte’.
Nach vierjährigen Tests und Untersuchungen soll nun mit einem Katamaran bewiesen werden, daß es möglich ist die gesamte Welt auch ohne fossile Brennstoffe zu umrunden. Entworfen und gebaut wird das Solarboot von der Firma Bluekat GmbH auf einer Werft in Niederkassel am Rhein.
Das 13,7 m lange und 7,5 m breite Schiff, das zur neuen Baureihe der Bluekat Kevlar-Epoxid High-Performance Katamarane gehört, wird ausschließlich von Solarpaneelen und Windgeneratoren mit Energie versorgt. Die Paneele stammen von zwei Herstellern: Von KIOTO kommen 40 Stück à 210 Wp mit einer Gesamtfläche 60 m2 und einem Wirkungsgrad von 14 % = 8,4 kWp, und von Day4Energie kommen 12 Paneele à 190 Wp mit einer Gesamtfläche von 15,6 m2 bei einem Wirkungsgrad von 14,6 % = 2,3 kWp.

Als Kleinwindräder sollen 4 Stück der 1,20 m durchmessenden, 11,5 kg schweren und 350 W leistenden 3-Blatt Superwind 350-Rotoren der 2004 gegründeten Firma Superwind GmbH aus Brühl eingesetzt werden (Stückpreis ca. 1.350 €). Als Motoren werden 2 Stück Kräutler 6 kW sowie 2 Stück Torqueedo 4 kW installiert.
Die Solarwave soll im Frühjahr 2010 zu ihrer 70.000 km langen und 15 – 20 Monate andauernden Tour starten. Auf Teiletappen werden auch einige wenige ausgewählte Personen mitfahren.
Im Gegensatz zu anderen Projekten wird kein Segel eingesetzt, kein Dieselmotor und auch keine Brennstoffzelle: An Bord gibt es nicht einmal Gas zum Kochen – alles wird rein solarelektrisch gemacht. Die 2-köpfige Crew soll über ein Jahr lang energieautark an Bord leben, ohne dabei auf die Produkte unserer technischen Zivilisation verzichten zu müssen. Daher haben die mitgeführten Batterie (44 kWh von EnerSys sowie 23 kWh von Erun) auch allerlei zu versorgen: Neben der elektrischen Ankerwinde, dem Funk, der Bordelektronik und der LED-Beleuchtung sind dies vor allem Induktionsherd, Mikrowelle, Brotbackautomat, Waschmaschine, Staubsauger, Kühl- und Gefrierschrank, Stereoanlage, Fernseher, Computer, Satellitentelefon und Klimaanlage!

Auch die Erzeugung des Trinkwassers wird solarelektrisch stattfinden, durch ein EcH²OTech-System mit einer Leistung von rund 42 l pro Stunde - und sogar die Beiboote werden elektrisch angetrieben.
Mich freut besonders, daß die verschiedenen Teams die sich der solaren Weltumrundung verschrieben haben, nicht als Konkurrenten, sondern vielmehr als Mitstreiter im Dienste einer guten Sache sehen. Bravo! Auf der Solarmesse im Mai 2009 in München beispielsweise treffen sich Michael Köhler und Luis Palmer (der im Jahr zuvor mit seinem Solartaxi die Welt umrundet hat) um zu plaudern und Synergien aufzubauen – und im Juni 2009 besucht Köhler das Hauptquartier von Planetsolar in Yverdon Les Bains in der Schweiz (s.o.), um Erfahrungen und Projektdaten auszutauschen.
Ich werde über die weiteren Schritte von Solarwave auch zukünftig aktuell berichten – schließlich zähle ich zu den Mitgliedern des ‚Personenkomitees’ dieses schönen Projektes!
Doch zunächst einmal die Jahresübersicht 2009:

Der Januar 2009 beginnt mit dem Design von Sungchul Yang und Woonghee Han, die sich ein strömungstechnisch optimiertes elektrisches 1-Personen-Unterseeboot namens AQUA ausdenken und als BA an ihrer University of Seoul einreichen. Technische Details gibt es keine – allerdings hat das Konzept im Vorjahr bereits beim US-Designwettbewerb IDEA und dem südkoreanischen Pinup Award jeweils einen Silberpreis bekommen. Außerdem wurde es auf der Design Korea 2008 in Guangzhou, China, ausgestellt.
Die US-Firma Edison Marine stellt Anfang 2009 ein bis zu 48 km/h schnelles Elektromotorboot vor, das aus solidem afrikanischen Mahagoni handgefertigt wird. Stilistisch ist es den barrel-back Motorbooten der 1940er nachempfunden. Das als ‚Ferrari des Wassers’ beschriebene Objekt kostet denn auch 120.000 $.

Der 5,20 m lange und nur 380 kg schwere Edison Cruiser ist mit zwei Hochleistungs-Elektromotoren und einem 144 V Batteriepack ausgestattet, das mit dem eingebauten Ladegerät in 4 – 5 h aufgeladen werden kann. Die anschließende Reichweite beträgt 8 – 10 h bei einer Geschwindigkeit von 8 – 11 km/h.
Geplant wird außerdem der Bau eines 6,7 m langen Boots für 160.000 $, das mit einem 250 PS Diesel-Elektrischen Hybridmotor (HDS, Hybrid Drive System) von der Steyer Motors GmbH bestückt werden soll, für den das Unternehmen übrigens 2008 den DAME Award gewonnen hatte.
Ende Januar kommt die verblüffende Meldung eines Wissenschaftlerteams der University of Pittsburgh, die eine optothermale Technologie entwickelt haben, mit der sich Boote und kleine Unterwasserroboter ohne Motor, Segel oder Ruder durchs Wasser bewegen lassen. Das neue Antriebssystem nutzt die Oberflächenspannung des Wassers sowie einen elektrischen Impuls, um das jeweilige Gefährt zu bewegen. Es hat keine beweglichen Teile und die Elektrode mit niedrigem Energieverbrauch, welche die Impulse abgibt, kann durch Batterien, Radiowellen oder Solarenergie versorgt werden. Eine der primären Anwendungen könnten billige und umweltfreundliche Roboter sein, welche die Weltmeere durchqueren um Forschungsdaten zu sammeln.
Bei den Experimenten emittiert die Elektrode eines 2 cm langen Mini-Boots eine Welle, die es mit einer Geschwindigkeit von rund 4 mm/s antreibt, während eine zweite Elektrode an der Vorderseite als Ruder dient. Ein vergleichbares System ist unter dem Namen Robostrider bereits 2003 am MIT entwickelt worden.
Im April 2009 stellen Forscher der University of California in Berkeley ein weiteres, sehr kleines Oberflächenspannungs-Boot aus Nanoröhrchen vor, das sich ausschließlich durch Sonnenlicht fortbewegt. Das Team um Alex Zettl und Jean M. J. Fréchet glaubt, daß diese Technologie in größerem Maßstab u.a. dazu genutzt werden kann, direkt solarbetriebene Wasserpumpen zu entwickeln – oder eben als Bootsantriebe zu dienen.

Das Mini-Maschinchen aus Berkeley besteht aus durchsichtigem Kunststoff, ist etwa 1 cm lang und mit Streifen aus vertikal ausgerichteten Kohlenstoff-Nanoröhrchen versehen. Trifft nun Sonnen- oder Laserlicht auf das schwimmende Gerät, nehmen die Nanoröhrchen die Hitze auf und erhitzen um sie herum das Wasser. Dies führt zu einer lokalen Abnahme der Oberflächenspannung an einem Ende der Maschine, die daraufhin nach vorne und weg von dem Bereich der niedrigen Oberflächenspannung angetrieben wird.
Im Gegensatz zu dem Pittsburgher System bedarf es dabei keinerlei elektrischer Pulse – und damit auch keiner mitgeführten Energiequelle.
Das Berkeley-Team hat im Labor bereits zwei sonnenbetriebene Maschinen getestet und demonstriert. Zum einen ein 1 cm langes rechteckiges Kunststoff-Boot mit einem Nanoröhrchen-Streifen an seinem Ende, welcher zu einer linearen Bewegung führt. Durch die Steuerung von Laserlicht oder mit Hilfe einer Linse, die das Sonnenlicht entweder in der Mitte oder an den Ecken des Nanoröhrchen-Streifens konzentriert, kann das Boot gerade ausgerichtet werden oder sich im Kreis bewegen, und dies mit einer Geschwindigkeit von bis zu 8 cm/s.
Die zweite Maschine bildet einen einfachen Rotor mit einem Nanoröhrchen-Streifen auf einer Seite jeder der vier Flossen. Wenn das Gerät direktem Sonnenlicht ausgesetzt wird, dreht es sich mit etwa 70 U/min.
Das Ponton-Solarboot The Loon der kanadischen Tamarack Lake Electric Boat Company, über das bereits in der Jahresübersicht 2005 berichtet wurde, wird 2008 komplett überarbeitet und erstmals im Februar 2009 öffentlich vorgestellt. Das neue Design stammt von den Teams 11E und Motive Industries, die auch das tropfenförmige Elektromobil Aptera 2e entworfen haben (s.d.) und soll mittels Solarenergie bei einem Maximum von 8 km/h pro Tag über 80 km zurücklegen können.

Das 6,70 m lange und 2,24 m breite, ebenfalls für 8 Personen gedachte Boot basiert auf einer leichten doppelwandigen Glasfaser/Verbundwerkstoff-Konstruktion mit flexibler Innenraum-Konfiguration und abnehmbaren Seitenteilen aus Bambus, Naturfasern und Recycling-Kunststoff. Auf dem Dach sitzt ein 1 kW Solarpaneel, das seine Energie in 8 Stück 6 V Blei/Säure-Batterien von AGM bzw. einen 5,5 PS Elektromotor speist. Die Reichweite soll 80,5 km betragen – bei einer Fahrtgeschwindigkeit von 12 km/h. Die Höchstgeschwindigkeit beträgt 15,3 km/h. Als Preis werden 32.500 $ genannt.
Den veröffentlichten Grafiken zufolge ist es möglich, das Solardach nach vorn und bis auf die Höhe der Sitze abzusenken, so daß nur noch der Steuerplatz unbedeckt bleibt. Die Produktion soll bereits Mitte des Jahres in der neuen Fabrik der Firma in Buffalo, New York, starten – was sich dann jedoch bis Anfang 2011 verzögert.
Unter dem Namen The Osprey wird auch ein fast 10 m langer vollelektrischer Solarkatamaran aus Aluminium für 30 Personen angeboten, der trotz seines 2 kW Solardachs allerdings eher wie eine schwimmende Scheune aussieht.

Anfang 2009 höre ich erstmals von der britischen Ruderin Roz Savage, die 2005 den Atlantik und 2008/2009 den pazifischen Ozean überquert hat, und von Kalifornien bis nach Hawaii gerudert ist. Womit diese Umweltaktivistin eher im Kapitel Muskelkraft ihren Platz hätte.
Hier geht es mir jedoch um ihr 7 m langes Boot, das mit 6 Solarpanelen und einen kleinen Windgenerator ausgestattet ist, welche ihre Computer, Kameras, eine Wasserbereitungsanlage und andere elektronische Geräte mit Strom versorgen. 2011 will Roz den indischen Ozean überqueren – rudernd und ebenfalls alleine.
Fast zeitgleich erscheinen in den Blogs Meldungen über das Hybrid-Sportboot EPIC 23e der Firma EPIC Wake Boats aus Vivian (o. San Diego?) in Kalifornien, das eine rund 50 %-ige Brennstoffeinsparung verspricht. Und behauptet, das erste seiner Art zu sein. Bemerkenswert sind die große Touchscreen-Steuerung, die GPS-basierte Geschwindigkeitskontrolle, ein 1,8 t Ballast-System und das doppelte Ruderblatt. Als Antrieb wird ein Flux Propulsion EVO 8.1 Marine Drive System genutzt. Die Ladezeit der Lithium-Ionen-Batterien soll nur 1 h betragen. Sie reichen aus, um mit dem 23e eine Stunde lang spritfrei zu fahren. Wenn die Batterien entladen sind, schaltet das System automatisch auf Spritverbrauch um, doch während der weiteren Fahrt werden die Batterien wieder aufgeladen, so daß ein weiteres Mal auf elektrische Energie umgeschaltet werden kann. Der Motor leistet über 375 PS, so daß das Boot eine maximale Geschwindigkeit von 58 km/h erreicht.

Das 7,32 m lange Speedboot für max. 14 Leute soll im Sommer auf den Markt kommen und ca. 150.000 $ kosten.
Im Januar 2010 wird dann das rein elektrische Modell EPIC 21se vorgestellt. Das 6,75 m lange Boot ist mit 60 kWh Li-Io-Akkus des Schwesterunternehmens Flux Power ausgestattet, die eine 10-stündige Fahrzeit erlauben. Der flüssigkeitsgekühlte, bürstenlose Gleichstrommotor liefert 268 PS und beschleunigt das 1.720 kg schwere Boot auf 64 km/h Spitze. 2011 wird auf der Homepage des Unternehmens eine weitere Version namens EPIC 232se angeboten. Dieses 2.639 kg schwere und 7 m lange Boot bietet Sitzplätze für 10 Personen und ist mit 60 kWh Lithium-Eisenphosphat-Akkus von Flux Power ausgestattet. Ab 2012 will man Versionen mit Diesel-/Elektromotor zu einem Preis von 70.000 $ anbieten.
Im März 2009 kursiert die Meldung, daß britische Wissenschaftler ein Gerät entwickelt haben, das in Gewässern die Quellen möglicher Verschmutzung wie verrostete Giftfässer, unzulässiges Verklappen oder lecke Pipelines bzw. Schiffe detektieren kann. Der mit unzähligen Sensoren bestückte Karpfen-ähnliche Roboterfisch der Forscher um Huosheng Hu an der Universität Essex soll ab September 2010 im Hafen von Gijon in Nordspanien drei Jahre lang im Wasser die verschiedensten Chemikalien aufspüren und die ermittelten Daten regelmäßig abliefern. Mitinitiant und Koordinator ist die britische BMT Group Ltd., gefördert wird das Projekt durch die Europäische Kommission.

(Universität Essex)
Im Gegensatz zu früheren Roboterfischen, die per Fernbedienung gesteuert wurden, haben die neuen Modelle autonome Navigationsfähigkeiten, wodurch sie unabhängig im Hafen herumschwimmen können. Die Fische sind in der Lage, sich untereinander mittels Ultraschall zu ‚verständigen’. Sobald die sich die Akkulaufzeit (ca. 8 Stunden) ihrem Ende nähert, schwimmen die Fische automatisch zu einer Ladestation, wobei sie außerdem über eine Wi-Fi Technologie die gesammelten Daten an die Hafenleitung übermitteln. Dort kann dann eine genaue 3D-Karte der Verschmutzungen erstellt werden.
Die veranschlagten Kosten pro Stück von etwa 22.000 € begrenzen die erste Serie auf fünf Stück der elektrisch betriebenen und 1,5 m langen Fische, die sich mit fischgleichen Bewegungen und einer Geschwindigkeit von 1 m/s fortbewegen können. Die Prototypen wurden seit 2005 in einem Spezialtank im Londoner Country Hall Aquarium getestet – sehr zur Freude junger Besucher. Sollten sie sich nun im Test bewähren, wird der Preis bei einer größeren Stückzahl natürlich sinken.
Ein weiterer Tauch-Roboter in der Form eines Fisches wird von den Wissenschaftlern Kamal Youcuf-Toumi und Pablo Valdivia y Alvarado am MIT entwickelt. Im Vergleich zu dem Essex-Modell handelt es sich allerdings um einen einfach konstruierten Roboter mit einem Motor und nur zehn Bauteilen. Er benötigt 2,5 – 5 W Energie (derzeit noch aus einer externen Quelle) und ist zwischen 13 und 20 cm lang. Zum Vergleich: Der erste Roboterfisch Robotuna des MIT aus dem Jahr 1994 besaß noch sechs Motoren und bestand aus 2.843 Einzelteilen.
Der Vollständigkeit halber sollen hier noch einige andere Projekte aufgeführt werden, die sich mit elektrisch angetriebenen Fischen beschäftigen. Forscher der Michigan State University um Xiaobo Tan beispielsweise werden von der National Science Foundation gefördert, um die Technologie eines Antriebs weiterzuentwickeln, der die Fischbewegung imitiert. Dabei werden künstliche Flossen untersucht, die in der gleichen Weise arbeiten, wie Fische ihre Muskeln benutzen.

(Michigan State University)
Die Flossen bestehen aus elektro-aktiven Polymeren, die beim Anlegen von Elektrizität ihre Form verändern. Ähnlich wie bei echtem Muskelgewebe, drehen und beugen die Bewegungen der Ionen das Polymer, wenn Spannung angelegt wird. Die Forscher haben bereits einen ca. 23 cm langen Prototyp gebaut, der einem Gelbbarsch nachempfunden ist. Das Ganze läuft unter dem Namen AquaSwarm Robot Fish Project.
An der britischen University of Bath wird wiederum an einem Gymnobot gearbeitet, der einem Süßwasser-Knifefish aus Amazonien nachempfunden ist und dessen wellenartige Bewegung nachahmt. Dabei wird die Vorwärtsbewegung durch eine Flosse erzielt, die entlang der Unterseite des starren Fischkörpers verläuft und im Wasser eine Welle verursacht, welche den Roboter wiederum vorwärts treibt.

Keineswegs wie ein Fisch aussehend, dafür aber autonom und mit einem Preis von 130.000 $ auch wesentlich teurer ist Waldo, ein seit 2005 aktiver Unterwasser-Roboter des Mote Marine Laboratory in Sarasota, Florida (2006 kommen zwei weitere Robots hinzu, die Nemo und Carmen genannt werden). Ende August 2009 verschwindet Waldos Signal, nachdem er sich zuvor auf seiner fünftägigen Patrouille im Südwesten Floridas brav alle zwei Stunden gemeldet hatte. Spezialität dieser schwimmenden Sensorplattformen ist das Auffinden und die Messung von Algenblüten mittels eines BreveBuster genannten Systems. Als Finderlohn wird ein Betrag von 500 $ ausgeschrieben.
Nach mehr als 10 Tagen ruft Waldo plötzlich wieder zu Hause an. Die Wissenschaftler finden ihn 11 Meilen westlich von Venice, nur etwa 50 m von der letzten bekannten Position entfernt. Einen wichtigen Einsatz absolviert der schwimmende Roboter im Juli 2010, als er zum Schutz der Florida Keys die Bewegungen der Ölteppiche aus der Katastrophe im mexikanischen Golf verfolgt und meldet. Waldo patrouilliert für etwa drei Wochen in den Gewässern nördlich und nordwestlich der Florida Keys am äußeren Kontinentalschelf – nonstop, entsprechend der Lebensdauer seiner Batterie.

Ebenfalls bei der Bohrplattform-Katastrophe wird im Mai 2010 der Tauchroboter iRobot Seaglider eingesetzt, ein AUV (Autonomous Underwater Vehicle), der ursprünglich von der University of Washington in Seattle entwickelt worden war. Mitte 2008 hatte sich die in Durham, North Carolina, beheimatete Firma iRobot das System lizenzieren lassen, um es für militärische Anwendungen zu adaptieren und auch anderweitig zu kommerzialisieren.
Im Laufe des Jahres 2009 führt der 52 kg schwere und speziell für tiefe Taucheinsätze bis 1.000 m konzipierte Seaglider im Pazifischen Ozean eine Rekordmission über einen Zeitraum von 9 Monaten und 5 Tagen durch, bei der er Dank seines energiesparenden Antriebs 737 Tauchgänge durchführt und eine Strecke von mehr als 4.900 km zurücklegt. Das 1,8 m lange und 30 cm dicke Gerät besitzt 1 m breite Stummelflügel sowie eine 1 m lange Antenne, über welche die gewonnenen Daten verschickt werden.
Interessant ist das Bewegungsprinzip des schwimmenden Roboters, da er sich ohne Propeller fortbewegt. Um zu tauchen, wird ein Ballasttank geflutet, wobei der schwere Akku nach vorn geschoben wird, damit sich die Nase des Seagliders nach unten richtet. Mittels der Flügel gleitet er daraufhin in einem schrägen Winkel von 16° - 45° abwärts, anstatt nur gerade zu sinken. Nach dem Tauchgang wird der Akku wieder nach hinten verschoben, wodurch sich die Nase aufrichtet und der inzwischen leergepumpte Ballasttank für Auftrieb sorgt. Dadurch gleitet der Seaglider in einem Winkel zur Oberfläche auf.
Mit seinen 10 V und 24 V Li-Io-Batteriepacks erreicht der Seaglider eine durchschnittliche Geschwindigkeit von 25 cm/s und kann bis zu 10 Monate lange autonome Missionen durchführen. Im Mai 2010 wird der Seaglider zur Datenaufnahme bei der Ölkatastrophe im Golf von Mexiko eingesetzt. iRobot berichtet, daß man bereits 120 Seaglider an die US Navy, verschiedene Behörden und Forscher verkauft habe.

Nicht direkt ein Solarschiff, aber dennoch in diesem Zusammenhang erwähnenswert, ist ein 18 m langer Katamaran aus 12.500 miteinander verschnürten gebrauchten PET-Flaschen, mit dem der Bankiersohn, Extremsportler und Öko-Aktivist David de Rothschild ein Zeichen gegen die Verschmutzung der Weltmeere und für Recycling setzen will – im Zuge einer Pazifiküberquerung. Der Prototyp, dessen Flaschen mit einem umweltfreundlichen Kleber aus Zucker und Cashew-Nüssen zusammengefügt sind, wird Anfang April 2009 in der Bucht von San Francisco getestet, beginnen sollte die 18.000 km lange Reise im Sommer – von San Francisco nach Sydney, vorbei an Honolulu, Oahu und dem Bikini-Atoll.
Rothschilds Plastiki (in Anlehnung an die Kon-Tiki von Thor Heyerdahl) soll von Kameras und einem stets in Reichweite befindlichen Rettungstrupp begleitet werden. Außerdem steckt das ganze Schiff voller Öko-Technik von Solarpanelen über Windlader bis hin zu mit Fahrrädern betriebenen Generatoren und einer Urin-Wasseraufbereitungsanlage (da kein Trinkwasser mitgeführt wird).

Highlight der Fahrt soll ein Abstecher zum Müllstrudel werden, auch Great Eastern Pacific Garbage Patch genannt, wo Strömungen die im Ozean treibenden Plastikabfälle an einem Punkt zusammengeschwemmt haben – wobei dieser ‚Punkt’ eine Fläche hat, die mittlerweile doppelt so groß wie Texas ist. Darüber habe ich schon im Teil A berichtet.
Tatsächlich legt die Plastiki – nach dreijähriger Vorbereitung – dann allerdings erst am 21. März 2010 in Sausalito nahe San Francisco ab und geht auf ihre rund 15.000 km (= 11.000 Seemeilen) lange Reise nach Australien. Neben De Rotschild sind u.a. die Skipperin Jo Royle sowie Olav Heyerdahl an Bord, der Enkel von Thor Heyerdahl. Nach gut vier Monaten erreicht die sechsköpfige Crew am 19. Juli 2010 wohlbehalten Mooloolaba, Queensland, etwas nördlich des eigentlich anvisierten Ziels Sydney, froh darüber, wieder festen Boden unter den Füßen zu spüren, nachdem man sich eine nur 27 m2 große Kajüte teilen und mit Salzwasser duschen mußte.
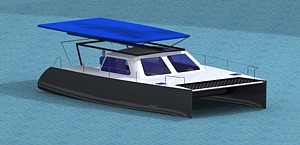
Ebenfalls im April 2009 wird erstmals der neue Luxus-Solarkatamaran der SolarWaterWorld AG vorgestellt. Der SunCat 23 wird von Horizon Yachts in KaohSiung, Taiwan, hergestellt, die äußere Gestaltung stammt von der Designerin J. C. Espinosa. In Berlin werden ab Juni drei Stück der neuen Charterboote eingesetzt, deren Listenpreis 59.000 € beträgt.

Aufgrund seines Designs fährt der SunCat 23 sehr energieeffizient, wobei der Saft für den 2,8 kW Elektromotor von 4 Solarpaneelen stammt, die jeweils 760 W generieren. Mit einer Besatzung von bis zu 12 Passagieren kann eine Höchstgeschwindigkeit von bis zu 6 Knoten erreicht werden, und mit einer voll aufgeladenen Batterie kann ein kompletter Tagesausflug unternommen werden, sogar bei Bewölkung.
Im August wird in Berlin auch der nagelneue Solarkatamaran C 60 der SolarWaterWorld AG für bis zu 60 Personen in Betrieb genommen – im Rahmen der erfolgreichen Kooperation von SolarPolis Berlin und der SolarWaterWorld. Getauft wird das Solarschiff auf den Namen SOLON, da der Berliner Modulhersteller SOLON SE Namenspate des Schiffes und Lieferant des Solargenerators aus 24 Solarmodulen mit zusammen 5,16 kW Spitzenleistung ist.

Der Rohbau und die Rümpfe des ca. 17 m langen und 6,60 m breiten Charterschiffes (Bautyp C60 Aquabus) werden in der Schweiz bei der MW Line Werft in Yverdon am Neuchateller See gebaut, wobei das Design der strömungsoptimierten Rümpfe von meinem Freund Thomas Meyer stammt, seines Zeichens Vorstandsvorsitzender der SolarWaterWorld AG. Der Innenausbau des Schiffes wird von der Architektin und Designerin Lika Valentien gestaltet und von der Bootsmanufaktur GmbH Berlin durchgeführt. Während der Fahrt kann die SOLON bis maximal 20 km/h beschleunigen – beim normalen Verkehr (in Berlin sind nur 12 km/h erlaubt) verbraucht das Boot mit ca. 1.600 W nicht mehr Energie als ein Toaster. Die Fahrdauer bei Sonne ist unbegrenzt, ohne Sonne sind immerhin noch 10 h drin.
Über den Deep Flight Super Falcon, eine Kombination aus Mini-Jet, Rennwagen und U-Boot, wird erstmals im Mai 2009 berichtet. Das knapp 7 m lange, leise und unauffällige Tauchboot für zwei Personen ist beispielsweise hervorragend dazu geeignet, Tiere zu beobachten, da es nur ein Minimum an Licht, Geräuschen und elektrischer Strahlung abgibt.
Der kalifornische Ingenieur Graham Hawkes und sein Unternehmen Hawkes Ocean Technologie arbeiten seit 20 Jahren an dem nur 1,8 t schweren Gerät, das Tauchgänge bis in 500 m Tiefe schafft und mit einer Ladung seiner Lithium-Batterien fünf Stunden unter Wasser bleiben kann. Das mit Stummelflügeln und zwei gläsernen halbkugelförmigen Cockpits ausgestattete Tauchboot ist so wendig, daß es komplette 360-Grad-Umdrehungen ausführen kann. Nun soll es im Sommer vor der kalifornischen Küste in Monterey seine ersten Testfahrten absolvieren.

Hawkes selbst hat die Designs von etwa zwei Dritteln aller bemannten Mini-U-Boote für Forschung und Industrie geschaffen. 1995 entwickelt er den ersten Prototyp des Deep Flight I, während er mit dem Deep Rover Nachfolgemodell schon in 1.000 m Tiefe taucht und damit einen Weltrekord für den bislang tiefsten Solo-Tauchgang aufstellt. Im Auftrag des US-amerikanischen Abenteurers Steve Fossett entwickelt er dann den Tiefseetaucher Deep Flight Challenger, mit dem er einen weiteren Rekord aufstellen will, in dem er an der tiefsten Stelle des Ozeans, im Marianengraben im westlichen Pazifik, auf Tauchgang geht, wo es rund 11.000 m tief hinab geht. Nach dem tödlichen Flugzeugabsturz Fossetts im September 2007 wird das Projekt jedoch eingestellt.
Der 1,1 Mio. € teure Zweisitzer findet bereits erste Interessenten, ein Exemplar kauft der kalifornische Milliardär und Segler Tom Perkins.
Der weltweit erste vollelektrische Jetski wird im Mai 2009 der Öffentlichkeit präsentiert. Unter dem Namen Eco1 wird ein relativ leise fahrendes Gerät angeboten, das eine Höchstgeschwindigkeit von 80 km/h erreicht. Die Lithium-Ionen-Batterie hat eine Kapazität für rund 3 h Fahrt – allerdings mit niedrigerer Geschwindigkeit. Hersteller ist das Startup Eco Watercraft aus San Francisco.
Wenn der Jetski im Laufe des Jahres 2011 in Produktion geht, soll er für 32.000 $ verkauft werden. Dann allerdings mit einer Höchstgeschwindigkeit von 96 km/h. Nachfolgemodelle soll es dann zu einem Preis von 10.000 $ bis 12.000 $ geben.
Ebenfalls im Mai 2009 bereiten sich die Fotografin und Bildhauerin Mary Mattingly und ihr Team auf die Jungfernfahrt des Waterpod im East River vor, eines schwimmenden Öko-Habitats, das auf den Arbeiten von Buckminster Fuller, Andrea Zittel, Robert Smithson und Constant Nieuwenhuis beruht. Die auf dem Wasser treibende Wohnstätte soll eine möglichst autarke Gemeinschaft bilden und wird deshalb mit interessanten Technologien ausgestattet, die von einer Ingenieursklasse der Humboldt State University entwickelt worden sind.

Neben einer Solaranlage, einer Bank mit Fahrradgeneratoren und einer 1,5 kW Vertikalachsen-Windkraftanlage gibt es an Bord muskelbetriebene Wasserpumpen, eine Regenwasseraufbereitung, einen Picohydro-Generator zur Gewinnung von Energie aus dem Fluß, Komposttoiletten zur Verarbeitung der Abfälle, einen effizienten Rocket Stove Kocher sowie einen Solarkocher, hydroponischen Gemüseanbau und Hühner.
Nach dreijähriger Vorbereitungszeit schippert die Plattform vom Juni bis zum Oktober 2009 zwischen New York und Governors Island herum, es werden diverse Feste gefeiert sowie Veranstaltungen und Ausstellungen durchgeführt. Auf der sehr ausführlichen und empfehlenswerten Homepage des Projekts finden sich viele weitere Details, Grafiken und Fotos. Die letzten Meldungen stammen vom Oktober 2010, aktuellere Informationen habe ich bislang nicht finden können.
Weitere Konzepte, die in dieser Zeit präsentiert werden sind das Luxus-Hybridschnellboot Onda Velocita, dessen Dach mit Solarzellen belegt ist und das von schubvektorgesteuerten Wasserstrahlen angetrieben wird, sowie der Sea Raider der Designers Muhammad Imran, der ebenfalls mit einem Solapanel/Batterie-System ausgestattet ist.

Ende Mai 2009 erreicht das Tiefsee-Robotgefährt Nereus der Woods Hole Oceanographic Institution, das vom Forschungsschiff Kilo Moana aus hinuntergelassen wird, einen der tiefsten Orte im Ozean, als es südlich von Japan 10.902 m weit in das Challengertief des Marianen-Grabens im westlichen Pazifik taucht.
Der 5 Mio. $ teure und ca. 2,8 t schwer Tauchroboter ist auf einem Aluminium-Gerüst aufgebaut, wobei die elektronischen Komponenten und die sensiblen Instrumente wie Kameras durch Keramikhüllen vor dem hohen Druck geschützt werden. Die ebenfalls in dem Gerüst eingebauten Lithium-Ionen-Akkus reichen für einen 12-stündigen Betrieb.
Die im Juni 2009 präsentierte CODE-X-Yacht wird als ultimative hybride Luxusyacht beschrieben. Gebaut wird sie nach einer Idee der Code-X AG in Meggen, im schweizerischen Kanton Luzern, wo sie auf dem Vierwaldstättersee ihre ersten Fahrten macht.

Kernstück der knapp 15 m langen Yacht ist ein neuartiges Antriebskonzept der Firma Silicon Fire Technologie. während die 1. Generation des Schiffes noch konventionellen Treibstoff und Sonnenenergie nutzt, wird in der 2. Generation Silicon Fire-Treibstoff und Sonnenenergie verwendet. Hier wird der Silicon Fire-Treibstoff mit regenerativer Energie aus Silizium gewonnen, wobei in einem chemisch-physikalischen Prozeß aus Silizium Wasserstoff entsteht. In einem weiteren Schritt verbindet sich der Wasserstoff mit Kohlendioxid, der als Abfallprodukt konventioneller Verbrennungsprozesse gewonnen wird.
Am Ende entsteht ein regenerativer Flüssigtreibstoff, der von Substanz und Wirkungsweise mit regenerativem Methanol vergleichbar ist, und dessen Herstellung in einer mobilen Einheit erfolgt, der Silicon Fire-Mobilstation. Mit diesem werden die zwei MV10-710 PS Formel 1 Motoren von Ilmor Marine angetrieben, die mit zwei ZF TRIMAX-Propellerantrieben kombiniert sind und der Designeryacht eine Maximalgeschwindigkeit von rund 80 Knoten erlauben. Der Solarhybridantrieb des Katamarans umfaßt ferner 2 Elektromotoren, deren Li-Io-Batterien durch ein großes Solarpanel aufgeladen werden. Später meldet das Unternehmen jedoch, daß das integrierte Solarsystem nur noch punktuell zur Stromversorgung von Bordsystemen eingesetzt wird.
Bislang nur ein Entwurf ist die 80M Eco Superyacht der Londoner Firma Rainsford Mann Design, die ebenfalls im Juni 2009 erstmals vorgestellt wird. Die 80,5 m lange und 13 m breite Ökoyacht aus Stahl, Aluminium und Verbundwerkstoffen ist mit zwei 2.050 kW Dieselmotoren, zwei Azimuth-Elektromotoren und zwei 550 kW Generatoren ausgestattet.

Die erneuerbare Energie kommt (wohl eher als Feigenblatt) von einer 10 kW Senkrechtachser-Windturbine und 20 m2 hocheffizienter Solarzellen, die gemeinsam 30 kW erwirtschaften und das LED-Beleuchtungsnetz der Yacht speisen. Außerdem sollen thermische Solarkollektoren eingesetzt werden, um ein Absorptionssystem zur Klimatisierung zu betreiben. Für die Zukunft ist ferner die Installation eines Sky Sail Systems angedacht (s.d.). Neben einer 20-köpfigen Crew gibt es luxuriösen Platz und zwei VIP-Suiten für bis zu 14 Passagiere, einen Preis konnte ich bislang nicht eruieren.
Kaum weniger luxuriös ist der Aeroyacht 121 Katamaran der New Yorker Aeroyacht International Ltd., der im Juli 2009 in den Fachblogs erscheint. Das Design stammt von Gregor Tarjan – Gründer and Leiter der Aeroyacht Ltd. – in Zusammenarbeit mit dem Team von Morrelli & Melvin. Eine der vielen Besonderheiten ist, daß das Segelschiff über ein mit einem Kran absetzbares zweisitziges, mit klappbaren Flügeln versehenes Wasserflugzeug des Typs ICON A5 verfügt.

Die 33,5 m langen Bootsrümpfe aus Kevlar und Carbon sind nicht nur extrem formstabil und leicht sondern auch noch kugelsicher, während das mit Solarpanelen gedeckte Dach des Aufbaus für eine weitgehende Autonomie des 13,7 m breiten und 48,2 t schweren Schiffes sorgt. Die Masthöhe beträgt 42,4 m, die Segelfläche 518 m2 und der Spinnaker hat 700 m2. Natürlich gibt es auch einen Twin-Diesel an Bord... und einen Jacuzzi-Pool.
Der neue Maßstäbe setzende und etwa 70 km/h schnelle Katamaran wird nun in der Wally-Werft in Ascona gebaut, für die Konstruktion werden zwei Jahre veranschlagt. 2011 wird die Aeroyacht 121 für 16,8 Mio. € angeboten (andere Quellen: 15,9 Mio. €).
Anthony Howarth gibt Mitte 2009 den Plan bekannt, mit einem Solarboot namens Solar Circumnavigator den Planeten in 120 – 130 Tagen einmal ganz umrunden zu wollen – was ja bekanntermaßen schon andere machen. Den Plan zur Bewältigung dieser Strecke von 25.000 nautischen Meilen hat er bereits 1986 gefaßt, doch mehrfach gelang es ihm nicht, das notwenige Kapital aufzutreiben. 1997 legte er das Projekt zu den Akten – ebenso wie einen 18 m langen 1:1 Prototypen, der 1995/96 gebaut worden war.

(im Bau)
Zwölf Jahre später bietet die niederländische Peoples Project Foundation aus Lelystad an, die Finanzierung der Solar-Weltumseglung zu übernehmen. Immerhin werden als Gesamtkosten 1 Mio. € veranschlagt. Es dauert dann jedoch noch bis Anfang 2011, als Howarth endlich mit dem Bau des Schiffes beginnen kann, das sich ausschließlich mit der aus Solarzellen gewonnenen Energie fortbewegen soll. Nun geht es umso schneller: Im Februar sind bereits die Tragestruktur und die Hülle fertig, im März folgen die Solarpanele und das Antriebssystem, und im April werden die Batterien eingebaut und die ersten technischen Testläufe durchgeführt.
Die Fahrt mit dem GreenCat genannten Leichtbau-Katamaran sollte eigentlich zwischen Mai und September 2011 erfolgen, verzögert sich dann jedoch aus bislang nicht bekannt gegebenen Gründen. Das auch von nur einer Person zu bedienende Solarschiff kann für kurze bis 1-Tages-Touren 12 oder mehr Personen an Bord nehmen. Die Tragfähigkeit soll 7,5 t betragen. Als durchschnittliche Fahrtgeschwindigkeit werden 10 Knoten angegeben, die Maximalgeschwindigkeit beträgt 20 Knoten. Die Solarzellen sollen eine automatische Sonnennachführung erhalten, und als Energiespeicher dienen Lithium-Ionen-Akkus.
Ende Juli 2009 wird bekannt, daß die Solar Sailor Holdings Ltd. aus Syndey, die seit dem Jahr 2000 im Hafen von Sydney das 100-Personen Solarschiff Solar Sailor betreibt, nun sogar drei neue Solarfähren sowie ein solares Passagierschiff für Hong Kong entwickelt. Die Schiffe werden vom Hong Kong Jockey Club gekauft – im Rahmen eines mit 45 Mio. $ ausgestatten Projekts bei dem es darum geht, den Stadtstaat nachhaltiger zu machen. Immerhin werden die Fähren mittels ihrer starren Solarsegel im Laufe einer erwarteten 15-jährigen Lebensdauer mehr als 6 Mio. $ Treibstoffkosten einsparen und die Kohlendioxid-Emissionen um 50 % reduzieren.

Der Energiebedarf, um Golfer zum Kau Sai Chau Public Golf Course zu bringen, wird zu 75 % aus der Sonne gedeckt, den Rest übernimmt ein Flüssiggas-Motor. Der Parallelhybrid-Antrieb besteht aus zwei 250 PS Cumins 6CTA 8.3M Motoren, zwei 25 kW Elektromotoren und einem 22,5 kW Generator des US-Herstellers Onan. Als Fahrtgeschwindigkeit werden 16 Knoten angegeben – nur Solar-/Windelektrisch sind immerhin noch 6 Knoten drin.
Das Design der 24 m langen und 6 m breiten Schiffe für jeweils 100 Passagiere stammt von dem australischen Büro Grahame Parker Design, gebaut werden sie auf der Leung Wan Kee Shipyard Ltd. in Hong Kong. Im Juni 2010 wird die erste Fähre im Hafen von Hong Kong in Betrieb genommen, die später den Namen Solar Albatross erhält.

Ebenfalls 2010 nimmt Solar Sailor gemeinsam mit der Firma Suntech während der Weltausstellung in Shanghai auch ein SunTech Guosheng VIP Touristenboot in Betrieb, das mit dem bislang weltweit größten Solarsegel ausgestattet ist. Das 31,5 m lange Solarboot ist auch das bislang größte Schiff, das Solar Sailor hergestellt hat.
Während heutige U-Boote nur etwa 30 Knoten schaffen, soll sich der Underwater Express mit 100 Knoten durch das Meer bewegen können. Um diese hohe Geschwindigkeit zu erreichen nutzt das Unterseeboot den hydrodynamischen Effekt der Superkavitation, auf den amerikanische Wissenschaftler bereits in den 1960er Jahren gestoßen waren. Sobald der Unterwasserexpreß genug Geschwindigkeit erreicht, bildet sich um das Wasserfahrzeug herum eine Luft- bzw. Dampfblase, welche die Reibung um mehr als 90 % minimiert und dadurch das hohe Tempo erst möglich macht. Bei langsamerer Fahrt kann durch das Ausblasen von Luft um die Bootshülle eine partielle Kavitation erreicht werden. Die Technologie wird bereits bei den russischen Shkval Torpedos genutzt, die bis zu 170 Knoten erreichen (und auch in dem fantastischen und sehr empfehlenswerten Thriller Madame Terror von Jan Guillou eine tragende Rolle spielen).
Das von der Defense Advanced Research Projects Agency (DARPA) mit 5,7 Mio. $ finanzierte Projekt beginnt Ende 2006 – und Mitte 2009 (o. 2010) werden vor Rhode Island die ersten Versuche mit einem Modell von einem Viertel Größe durchgeführt. Im Erfolgsfall soll der in Groton, Connecticut, beheimatete Entwickler Electric Boat, eine Tochterfirma von General Dynamics, ein echtes U-Boot mit 30 m Länge bauen, was das Vertragsvolumen auf insgesamt 43 Mio. $ anhebt. Interessant ist, daß sich sogar auf der Seite von Electric Boat nur eine einzige Meldung darüber finden läßt: die erste vom November 2006. Die technischen Details und Versuchsberichte scheinen noch geheimgehalten zu werden (Stand Mitte 2011).
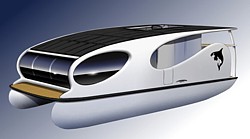
Im September 2009 stellt der französische Luxusgüterkonzern Hermès auf der Monaco Yacht Show das Modell seiner ersten Megayacht vor, die in Zusammenarbeit mit dem italienischen Bootsbauer Wally gebaut wird. Die beiden Unternehmen hatten 2008 dafür das Joint Venture Wally Hermès Yachts (WHY) gegründet. Je nach Ausstattung soll die Yacht zwischen 60 und 100 Mio. € kosten.

Die für 20 Besatzungsmitglieder und zwölf Gäste entworfene 58 m lange und 38 m breite futuristische Motoryacht hat alles, was für ein autonomes und luxuriöses Leben auf dem Meer nötig ist. Auf vier Ebenen ist eine Wohnfläche von 3.400 m2 verteilt, es gibt einem 25 m langen Pool und einen Hubschrauberlandeplatz. Der 2.400 kW Hybridmotor wird mit Strom aus insgesamt 900 m2 großen Solarpanelen versorgt (die z.T. wie Dachjalousien eingefahren werden können) und kann das Schiff auf eine Geschwindigkeit bis 14 Knoten (25,9 km/h) beschleunigen. Es gibt ferner 60 m2 solarthermische Kollektoren, LiFePO4-Batterien (2.000 kWh), ein Gegenwasser-Sammelsystem u.v.m. Die Konstrukteure denken außerdem an ein Skysail-System mit einem einziehbaren Mast und einem computergesteuerten 200 m2 großen Zugdrachen, der mindestens 30 % der Antriebsenergie decken soll. Eine kleinere Yacht in den Maßen 37 x 24 m ist ebenfalls in Planung.
Andere Schiffe mit Hybridantrieben, die um diese Zeit in die Presse kommen, sind die 23 m lange Mochi Craft Long Range 23 der Ferretti Group und dem Studio Zuccon International Project, deren 70 kW Elektromotoren von Lithium-Ionen Batterien versorgt werden, das Konzept einer 9 m langen Sportyacht namens Razor aus dem Portfolio des Industriedesigners Atanas Yanev, deren zwei E-Motoren entweder durch Brennstoffzellen oder durch eine Methanol/Flüssiggas-Hybridturbine mit angeschlossenen Li-Po-Batterien angetrieben werden, die Hybridyacht N-DOUR des Designers Riccardo Pilurzu, bei der Sonne und Wind genutzt werden um Wasserstoff als Energiezwischenspeicher zu produzieren, sowie die etwa 45 m lange Green Voyager 144 von Kingship und Axis Group Yacht Design, die mit wärmereflektierendem Glas, hocheffizienter Isolierung, Wärmerückgewinnung und Wärmepumpe ausgestattet ist, was den Energiebedarf um etwa 20 % senken soll. Dieses Schiff wird in China gebaut. Hierzu motivierend ist die neue Green Star Plus Klassifikation der italienischen Zertifizierungsgesellschaft RINA, welche den höchsten Umweltstandard für Schiffe darstellt.
Im Oktober 2009 werden in Karlsruhe die Deutschen Solarpreise der Eurosolar vergeben. Gewinner ist u.a. die SolarWaterWorld AG für den Aufbau einer Solarbootflotte in Berlin. Herzlichen Glückwunsch!
Im selben Monat kündigt der japanische Schiffbauer IHI Corp. an, daß man den Bau einer ausschließlich Batterie-betriebenen Großfähre für 800 Personen plant. Das Plug-in Schiff wird eine Batteriekapazität von ca. 5.000 kWh haben (andere Quellen: 3.000 kWh), womit es nach einer Ladezeit von 6 – 8 h eine 120 km lange Fahrtstrecke zurücklegen kann. Man rechnet mit um etwa 60 % höhere Baukosten im Vergleich zu herkömmlichen Fähren. Die Unternehmenstochter IHI Marine United plant, mit dem Bau der 30 m langen Fähre im Jahr 2015 zu starten, wenn Hochleistungsakkus zu geringeren Kosten verfügbar werden. Das Projekt läuft unter dem Namen IHIMU-ZEEPS (IHIMU Zero Emission Electric Propulsion Ship). Weitere Konzepte des Unternehmens betreffen große Fracht- und Containerschiffe, die durch gegenläufige Doppelpropeller, hochentwickelte hydro- und aerodynamische Strukturen, Solarzellen und andere technologische Neuerungen signifikante Verbrauchsminderungen erreichen.
Die Creative Worldwide Ltd., mit Sitz in Wales, stellt im Oktober 2009 ein bemerkenswertes Wasserfahrzeug namens Scubacraft SC3 vor, eine Mischung aus Speed-Boot und U-Boot mit einem sehr leichten Gesamtgewicht von nur 390 kg. An der Wasseroberfläche wird das Boot von einem 160 PS Inline-4-Zylinder mit Wasserstrahlantrieb auf eine Höchstgeschwindigkeit von 80 km/h gebracht. Ziehen die bis zu drei Insassen entsprechende Geräte an, können sie mit dem Scubacraft bis zu einer Tiefe von 30 m tauchen. Dazu werden zwei große aufblasbare Schläuche entleert, die sich innerhalb des Rumpfes befinden. In diesem Modus erfolgt der Antrieb durch Lithium-Batterien und vier elektrische Triebwerke an der Vorder- und Rückseite des Gefährts.

Die Insassen atmen über eine Standard-Tauchausrüstung - so daß sie das Fahrzeug auch verlassen können. Um auftzuauchen werden die Schläuche wieder aufgeblasen. Der modulare Aufbau ermöglicht es, die elektrische Anlage bei Bedarf zu modifizieren, indem zusätzliche Batterien für längere Operationen oder mehr Triebwerken für mehr Leistung installiert werden. Das Unternehmen arbeitet auch an einer Version für 6 Personen (Scubacraft SC6).
Auch in diesem Monat werden neue Entwürfe veröffentlicht. Von Demetrius Tanase stammt die 12 m lange Konzept-Yacht Poseidon für 4 – 8 Personen, deren Segel im Grunde ein einziges flexibles Dünnschicht-Solarpanel darstellt (was es bislang leider noch nicht gibt). Ein weiteres Solarsegler-Design von Tanase wird unter dem Namen Marlin Yacht bekannt.
Magnum Marine wiederum präsentiert eine Yacht aus der Feder des italienischen Designers Alberto Mancini, die mit einem Hybridantrieb und anderen nachhaltigen Technologien ausgestattet ist. Die 55 Knoten schnelle Magnum 100 soll durch den Einsatz neuartiger Baumaterialien wie Komposit-Schäume und Kohlefasern 20 % weniger wiegen als vergleichbare Schiffe und ab 2012 in Produktion gehen. Für Hafenfahrten gibt es einen eigenen Elektroantrieb an Bord. Die beiden MTU Dieselmotoren mit zusammen 2.600 PS für schnelle Fahrten sind dann allerdings schon wesentlich weniger umweltfreundlich.

Dann doch lieber ein kleiner China-Import, mit dem man elektrisch über das Wasser rauschen kann: Das Sea Motorboat LB-WS02A (es gibt auch noch andere Modelle) der China Selowo Co. Ltd. mißt 145 x 65 x 60 cm, wiegt 6 kg, hat einen 150 W Motor und eine 12 V/7 Ah Batterie, mit der eine Geschwindigkeit bis zu 3,2 km/h erreicht werden kann. Nach 40 – 50 Minuten Spaß ist eine Ladezeit von 4 – 6 h angesagt. Ein Preis wird nicht angegeben, er kann jedoch nicht so hoch sein, denn der Korpus des ‚Wasser-Reittiers’ besteht aus einer aufblasbaren Plastikfolie.
Ende November 2009 und nach fünf Jahren Forschung und Entwicklung pdurch eine Gruppe von Wissenschaftlern und Ingenieuren des JPL und der Scripps Institution of Oceanography, wird südwestlich von Hawaii das erste unbemannte Unterwasserfahrzeug (UUV) eingesetzt, das vollständig durch erneuerbare Energien betrieben wird. Der SOLO-TREC (Sounding Oceanographic Lagrangian Observer – Thermal RECharging) bezieht seinen Strom aus den Temperaturunterschieden im Ozean (mehr über diese Technologien findet sich in den Kapiteln Micro Energy Harvesting und Wärme).

Der Mechanismus ist relativ einfach: Um das Tauchgerät herum sind eine Vielzahl von Röhren angebracht, die mit einem speziellen, wachsähnlichen Phasenwechselmaterial (Phase Change Materials, PCM) befüllt sind. Dieses Material expandiert um ca. 13 %, wenn es auf über 10°C erwärmt wird, und zieht sich entsprechend zusammen, sobald es unter 10°C abgekühlt wird. Diese Expansion / Kontraktion erzeugt einen hohen Öldruck, der gesammelt und in regelmäßigen Abständen freigegeben wird, um einen hydraulischen Motor zur Stromerzeugung und zum Laden der Akkus zu betreiben.
Seit seinem Ersteinsatz führt der 81,5 kg schwere SOLO-TREC pro Tag 3 bis 4 Tauchgänge zwischen der Oberfläche und 500 m Tiefe durch, wobei das Gerät pro Tauchgang etwa 1,6 Wh Strom produziert (oder 30 Sekunden lang 200 W), mit dem die On-Board-Sensoren, der GPS-Empfänger, die Kommunikationsgeräte sowie eine Pumpe betrieben werden, mit der das Auf- und Absteigen des Tauchroboters gesteuert wird.
Die Finanzierung erfolgte zwischen 2005 und 2007 durch das Research & Technology Development-Programm der JPL, und anschließend von 2008 bis 2010 durch das Office of Naval Research (ONR) der US-Navy.

Weitere Unterwasser-Roboter, auf die ich an dieser Stelle hinweisen möchte, sind das Ring Hydro Vessel Agent Under-liquid (RHyVAU) System der 2002 gegründeten Firma GO Science Ltd. im britischen Bristol, die zum Einsatz in koordinierten Schwärmen bis zu 2.500 Stück gedacht sind. Diese Koordination erfolgt durch Kompaß, Sensoren und akustische Signale, zu denen an der Oberfläche noch GPS-Daten kommen. Wichtigstes Marktsegment scheint die Exploration weiterer Öllagerstätten zu sein, denn das Unternehmen unterzeichnet bereits im September 2009 einen entsprechenden 10 Mio. $ Vertrag mit einem nicht genannten Ölunternehmen.
Besonders Merkmal der Tauchroboter von GO Science ist der markante Ringflügel mit zwei innen angebrachten Propellern, der es dem Gerät erlaubt, mit seinem Batterieantrieb eine Geschwindigkeit von bis zu 8 Knoten zu erreichen.
Die Forscher der Scripps Institution of Oceanography in San Diego wiederum erhalten im November 2009 seitens der National Science Foundation eine Förderung in Höhe von 1 Mio. $, um die bei Scripps entworfenen AUEs (Autonomous Underwater Explorers) weiterzuentwickeln.

Hunderte dieser Roboter-Drohnen von der Größe eines Fußballs könnten zukünftig Meeresströmungen verfolgen, schädliche Algenblüten entdecken, bei Katastrophen die Ausbreitung von Ölverschmutzungen zu detektieren oder im Falle eines Flugzeugabsturzes nach der Black Box zu suchen. Die Scripps-Forscher planen nun den Bau von fünf oder sechs Prototypen in der Größe von Fußbällen, zusammen mit rund 20 kleineren Versionen.
Ebenfalls Mitbewerber – zumindest an der Wasseroberfläche – sind die neuen autonomen, solarbetriebenen Seaswarm-Schwimmroboter des MIT, die als low-cost System in erster Linie Ölrückstände sammeln sollen. Die auch ‚Handtuch-Bots’ genannten Schwimmroboter sollen in Schwärmen beispielsweise den Golf von Mexiko säubern. Jeder einzelne Roboter bewegt sich wie ein Panzer durch das Wasser, wobei er eine Art Förderband benutzt um über die Oberfläche des Ozeans zu rollen. Dieses Band besteht aus einem patentierten ultraleichten Nanodraht-Webenetz (Mesh), welches bis zum 20-fachen seines Eigengewichts Öl absorbieren kann.

Das Band ist an dem gelben Kopfteil des Roboters befestigt, welches mit einem PV-Panel verkleidet ist. Während sich das Gerät mit dem Kopf voran durch das Wasser bewegt, saugt das Förderband das Öl auf, das anschließend in dem Sammelbehälter innerhalb des Kopfteiles ausgepreßt wird um danach seine Endloszirkulation fortzusetzen. Die Kommunikation der Roboter untereinander erfolgt mittels GPS und WiFi-Netzwerken.
Das Design-Team testet seine Prototypen im Charles River in Boston und stellt fest, daß sich das Förderband leicht an die Oberfläche der Wellen anpaßt. Die im großen einsatzfähigen Systeme sollen 16 m lang und 7 m breit werden.
Am 3. Dezember erreicht der autonome, batteriebetriebene Unterwasser-Robotgleiter Scarlet Knight (RU-27) Spanien – nachdem er am 29. April in New Jersey gestartet und im Laufe von 221 Tagen den Atlantik durchquert und dabei eine Strecke von 7.389 km zurückgelegt hat. Als Luftlinie gesehen beträgt die bewältigte Strecke 5.323 km. Der Name bezieht sich übrigens auf das Football-Team der Uni.

Bei dem Schwimmroboter handelt sich um einen Verwandten von Waldo (s.o.), der zur Aufnahme von Klimadaten wie Temperaturänderungen und unterseeischen Strömungen programmiert ist. Das Auf- und Absteigen des von der Rutgers University ins Wasser gebrachten 60 kg schweren und 2,5 m langen Gleiters erfolgt durch einen kleinen Kolben, der den inneren Druck verändert (oder die Luft aus einer Kammer von vorn nach hinten pumpt?). Die Batterie hat eine Betriebsdauer von bis zu einem Jahr. Dem Projektleiter Scott Glenn zufolge können die Maschinen bis 200 m tief tauchen und auch mit 7 m hohen Wellen klarkommen, da sie wie Delphine schwimmen.
Ein Vorgängermodell RU-17 war trotzdem zuvor irgendwo an den Küsten der Azoren verloren gegangen. Der aktuelle Erfolg weckt die Aufmerksamkeit der US-Navy, die den Ankauf von 300 Stück der Schwimmroboter erwägt.
Im Dezember 2009 stellt Sunreef Yachts das Konzept einer mit Solarzellen laminierten Katamaran-Superyacht namens ONE FIFTY vor, die mit ihren 45 m Länge Platz für 12 Passagiere und eine 9-köpfige Crew bietet, von dem Industriedesigner Adam Valmassoi stammt der Entwurf einer Leviathan Yacht, die mit zwei elektrischen Jetpumpen angetrieben wird, welche von verschiedenen Windturbinen und großflächigen Solarpanelen an Bord mit Strom versorgt werden, und erstmals macht auch ein ägyptisches Designbüro Pharos Marine von sich reden, als es mit der 60 m langen Yacht Orcageno das Konzept eines 18 Knoten schnellen Schiffes vorstellt, das mit einem Wasserstoff/Diesel-Hybridmotor angetrieben wird.

Von Zack Stephänchick stammt das Design der knapp 43 m langen, futuristischen Enso Katamaran-Yacht mit zwei Tragflächen-Segeln, die vom Zen Buddhismus und anderen östlichen Philosophien inspiriert worden sein soll. Ich selber sehe eher gewisse Ähnlichkeiten mit dem SpaceShipTwo von Virgin Galactic. Leider gibt es keine weiteren Details zu erfahren.
Andere neue Designs sind die sich bereits im Bau befindliche Solar-Hybridyacht Arcadia, die in zwei Variationen von rund 23 m bzw. 53 m auf den Markt kommen soll. Initiator ist die Startup-Firma Arcadia Yachts. Im reinen Elektrobetrieb soll eine Geschwindigkeit von 8 Knoten erreicht werden. Adam Voorhees 125 m lange, 30,5 m breite und Katamaran-ähnliche Riparian Yacht wiederum verbindet 1.120 m2 Solarzellen mit einem 30 MW-Stack von PEM-Wasserstoff-Brennstoffzellen. Das knapp 5.000 t schwere Wassergefährt kann eine Maximalgeschwindigkeit von 50 Knoten erreichen und besitzt eine Reichweite von über 10.000 nautischen Meilen. Und von Carl Hagerling kommt ein kleines Solarmotorboot für 3 Personen namens Iron 23. Die holländischen Tüftler David Czap und Niels Beers bauen ihrerseits ein Solar-Speedboot, dessen Oberseite mit 14 m2 Solarzellen beschichtet ist. Dies reicht aus um den 80 kW Elektromotor des Schiffs mit genügend Strom zu versorgen. Czap und Beers testen das Boot erfolgreich bei mehreren Regatten, wo es eine Höchstgeschwindigkeit von 30 Knoten erreicht.
Die Code [e] des Berret Racoupeau Yacht Design Teams soll Sonne, Wind und Wasser nutzen, um sich brennstofflos fortzubewegen. Die integrierten 40 m2 Solarzellen und zwei Senkrechtachser sollen zusammen 1,1 kW erwirtschaften. Beim segeln liefern zwei kleine Wasserturbinen zusätzlichen Strom. Ebenfalls nur auf Sonnenstrom verläßt sich die Esthec Superyacht des Designers Dennis Ingemansson.

Das interessanteste Konzept, das Ende 2009 veröffentlicht wird, ist die Diplomarbeit des Designstudenten Julien Anglade vom Strate Collège in Paris, der bei seiner Ikkar Yacht die Nutzung von Solarenergie mit den schon heute umsetzbaren Transformationstechniken verbindet.
Das Hybridschiff für 50 Passagiere und eine Crew von 60 Mann kann seine Hülle öffnen und die Bordwände flach auf das Wasser legen – wodurch sich das 150 m lange Schiff in eine Art Trimaran verwandelt und zu so etwas wie eine Badespaß-Landschaft wird. Oben sitzt ein Sonnensegel mit PV-Zellen, das Energie zum Betrieb des Schiffes gewinnt.
Der Designer Marco De Santi vom 4P1B Design Studio in Milano gewinnt mit seinem motorisierten Bodyboard einen ersten Platz beim Lucky Strike T. Designer Award 2009.

Das Konzept des Titus Bodyboard wurde speziell entwickelt, um Rettungsschwimmern die Möglichkeit zu geben, sich – auf dem Bauch darauf liegend – sehr schnell über das Wasser zu bewegen. In den aktuellen Publikationen werden keine Details angegeben, doch aus der Wettbewerbspräsentation kann man entnehmen, daß das Board mit einem Elektromotor ausgestattet ist, der einen unten liegenden Propeller antreibt. Die Form des Bodyboards wurde so optimiert, daß die gerettete Person leicht darauf gelegt und sicher an den Strand zurück gebracht werden kann.
Ganz ohne menschlichen Rettungsschwimmer soll der Lebensretter EMILY (EMergency Integrated Lifesaving lanYard) auskommen, der bei einer Reichweite von 1,6 km und mit Maximalgeschwindigkeit von 39 km/h mehrfach schneller ist als seine menschlichen Kollegen, wobei das System diese Geschwindigkeit maximal 15 Minuten lang durchhält.

Die aktuelle Version des ca. 11 kg schweren Schwimmroboters der US-Firma Hydronalix wird noch mit einer Fernbedienung kontrolliert, soll aber schon nächstes Jahr durch ein vollständig autonomes System ersetzt werden. Dieses erkennt Menschen in Not per Sonar an ihren Bewegungen und eilt selbstständig zur Hilfe. Alternativ können die Robots auch von Schiffen, Hubschraubern oder Flugzeugen ins Wasser geworfen werden.
Sobald der gefährdete Schwimmer erreicht ist kann der Rettungsdienst an Land mittels Lautsprecher und Kamera Kontakt zu diesem aufnehmen, ihn beruhigen und dazu auffordern, sich an EMILY festzuhalten. Der 137 x 40 x 20 cm große Roboter bringt ihn dann zurück zum Strand. Der gegenwärtige Stückpreis liegt bei 3.500 $, und die Betriebszeit mit einer vollen Batterieladung (577 Wh) beträgt bei langsamer Patrouillenfahrt über 8 h.
Eine neue Version soll nur noch 9 kg wiegen, eine Geschwindigkeit bis 51,5 km/h erreichen und sich aus einer Höhe von bis zu 9 m abwerfen lassen. Das Unternehmen stellt übrigens auch ein selbständig operierendes elektrisches Kleinstschnellboot mit Kamera her.