Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und Solarfluggeräte (I)
1894 - 1996
In diesem Kapitel stelle ich sowohl elektrische Flugzeuge mit
ausschließlichem Batterieantrieb, als auch Flugzeuge mit
Solarzellen mit oder ohne Akkumulatoren vor. Hinzu kommen
elektrisch betriebene Hubschrauber sowie die sich in
jüngster Zeit zunehmend verbreitenden Drohnen aller
Art - sofern diese nicht mit konventionellen Brennstoffen angetrieben
werden.
Der Einsatz von Elektrizität für den Flugbetrieb wird zunächst bei Luftschiffen erprobt (s.d.) - beginnend mit der La France des französischen Hauptmanns Charles Renard, die von einem 9 PS Elektromotor angetrieben im August 1884 zu ihrem Jungfernflug aufsteigt - womit sie als erstes elektrisch betriebenes Fluggerät überhaupt gilt.
Zu den Vorläufern des Elektroflugs (schwerer als Luft) gehört
die
Entwicklung eines elektrisch betriebenen Helikopters durch
den ungarischen Major Stephan Petróczy von Petrócz,
der damit die damals genutzten wasserstoffgefüllten Ballone zur Artilleriebeobachtung
ersetzen will. Die 1917 beginnende Geschichte lohnt
es, etwas ausführlicher erzählt zu werden.
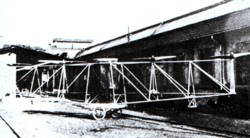
Die Idee selbst ist nicht neu, denn der österreichische Flugpionier und Konstrukteur Wilhelm Kress hatte bereits 1894 ein kleines, 33 kg schweres Modell von mit gegenläufigen Propellern gebaut, das von einem Elektromotor angetrieben wurde. Finanzielle Unterstützung für den Bau erhält er durch den berühmten Physiker Ludwig Boltzmann in Wien. Im Jahr 1895 kann das Gerät erfolgreich einem Technischen Militärkomitee vorgeführt werden. Kress schlägt dabei den Bau eines Mann-tragenden Hubschraubers mit einem Gewicht von 325 kg vor, der von einem 20 PS Motor angetrieben werden soll. Eine Umsetzung erfolgt jedoch nicht.
Anders, als sich Petróczy im April 1916 mit Ferdinand Porsche, dem Chefingenieur von Austro-Daimler, einigen seiner Assistenten, dem Oeffag-Direktor Karl Ockermüller sowie Dipl.-lng. Karl Balaban trifft, um die Machbarkeit eines solchen Fluggeräts zu diskutieren. Denn nachdem Petróczy seinen Vorschlag anschließend dem K. u. K. Kriegsministerium vorlegt, erhält er einen überaus generösen Betrag in Höhe von 100.000 Kronen, um die Entwicklung seines ,Schraubenfesselfliegers’ (d.h. eines gefesselten Hubschraubers) zu verwirklichen.
Die nötigen Voraussetzungen für eine erfolgreiche Umsetzung bieten die Einrichtungen K. u. K. Militäraeronautischen Anstalt in Fischamend im damaligen Österreich-Ungarn, wo auch der damals erste Windkanal der Welt zur Prüfung von Luftschrauben steht. Als Petróczy Mitte 1917 zudem zum Kommandanten des Fliegerarsenals ernannt wird, kann er sich ganz seinem Projekt widmen.
Das Konzept sieht vor, am Boden einen von einem Benzinmotor angetriebenen Generator aufzustellen und die elektrische Energie über die Fesselungsseile zu einem Elektromotor im Fluggerät zu leiten. Die Aufgabe, einen Prototypen zu konstruieren, bekommen Oberleutnant Theodor von Kármán (der später als Aerodynamiker berühmt wird) und Ingenieurleutnant Wilhelm Zurovec.
Letzterer baut einen 4kg schweren und 6 PS starken Preßluftmotor, mit dem ein rund 35 kg schweres, flugfähiges Modell angetrieben wird, das zwischen Juli 1917 und März 1918 im großen Ballonhangar ca. 50 Testflüge bin zu einer Höhe von 15 m durchführt. Dabei zeigt sich, daß mit einem oder zwei Fesselungsseilen keine dynamische Stabilität zu erreichen ist. Zufriedenstellende Resultate bei Flughöhen von mehr als 10 m werden erst mit einem Dreikabelsystem erzielt.
Nachdem sich Kármán und Zurovec diese Erfindung 1917 patentieren lassen, wird die Firma MAG in Mátyásföld mit dem Bau einer manntragenden Version beauftragt. Das im Februar 1918 fertiggestellte Fluggerät wird als PKZ 1 bezeichnet, entsprechend den Initialisieren von Petróczy, Kármán und Zurovec.
Der Schrauben-Fesselflieger wiegt leer 650 kg, davon der Daimler-Elektromotor alleine 195 kg. Dieser liefert zwar nur 190 PS an die vier Rotoren (Rotordruchmesser: zunächst 3,9 m, später 4,2 m), 60 PS weniger als ursprünglich vorgesehen, dennoch hebt das Gerät schon beim ersten Flug bei einer Rotordrehzahl von 700 U/min ab und steigt bis zur Fesselungshöhe von 0,5 m. Der Strom wird durch ein Aluminiumkabel übertragen. Auch nachdem drei Mann in den aufgesetztem Beobachterkorb klettern, schwebt der Helikopter, weiterhin gehalten durch die Fesselungsseile, und steigt etliche Male bis zu 5 m auf.
Nach 15 Minuten des 4. Fluges brennt der überforderte Elektromotor allerdings durch und kann wegen der Materialknappheit Ende des 1. Weltkrieges nicht mehr instandgesetzt werden. Mit dem PKZ 1 ist aber immerhin die Flugfähigkeit eines elektrisch angetriebenen Helikopters bewiesen.

Der anschließend von Zurovec mit gegenläufigen hölzernen Luftschrauben konstruierte Schraubenfesselflieger PKZ-2 wird mit drei direkt im Rohrgestell befestigten Benzin-Motoren angetrieben, weshalb er hier nicht weiter behandelt wird. Abgesehen von der Informationen, daß dieser Senkrechtstarter bei 36 unbemannten Testflügen eine Flughöhe von bis zu 50 m erreicht, was zu jener Zeit einen Rekord darstellt – bevor er bei einer Vorführung im Juni 1918 abstürzt.
Ebenfalls aus dem Jahr 1917 stammt der Kettering
Bug, ein unbemanntes Flugzeug, das von Charles Kettering in
den USA für den Einsatz im Ersten Weltkrieg konstruiert wird.
Das als Doppeldecker ausgelegte, 240 kg schwere Fluggerät hat zwar einen Brennstoff-betriebenen 4-Zylinder Kolbenmotor, soll an dieser Stelle aber erwähnt werden, da es als die weltweit erste Drohne gilt, die allerdings nicht ferngesteuert, sondern vorprogrammiert wurde. Die Nutzlast aus ungefähr 80 kg Sprengstoff nebst Aufschlagzünder konnte etwa 100 km weit befördert werden.
(Grafik)
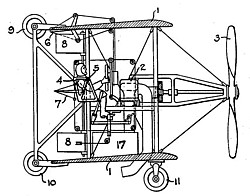
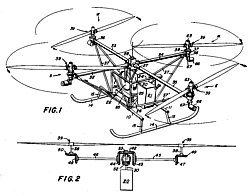
Insbesondere im Hinblick auf das riesige Entwicklungspotential der senkrecht startenden und landenden Fluggeräte, das nach dem Millenniumswechsel verstärkt ins öffentliche Interesse rückt, sei hier auch auf ein Patent des berühmten Nikola Tesla aus dem Jahr 1928 verwiesen (US-Nr. 1.655.114, angemeldet 1927).
Wie die New York Times es damals beschrieb, habe der serbische Erfinder ein ‚Helikopterflugzeug‘ erfunden, da er erkannte, daß ein Hauptnachteil der konventionellen Flugzeuge darin besteht, daß sie lange Start- und Landebahnen benötigen. Teslas Senkrechtstarter-Flugzeug wurde allerdings nie gebaut, was den Wissenschaftler vor einer beträchtlichen Blamage bewahrte – denn es wäre nicht geflogen.
Der grundlegende Ansatz, daß ein Fluggerät durch dieselbe Antriebsvorrichtung vertikal angehoben und abgesenkt sowie horizontal angetrieben wird, indem die Maschine beim Start senkrecht bis zur gewünschten Höhe aufsteigt, wo sie sich allmählich um 90° nach vorn neigt und in den Vorwärtsflug übergeht, wobei sich der Pilotensitz entsprechend dreht, kann als Vorläufer einer ganzen Reihe an Multikoptern gesehen werden, die mit dem gleichen Prinzip höhere Reichweiten erzielen möchten.

(Grafik)
Im November 1939 erscheint in dem US-Magazin Popular
Science eine Kurzmeldung über Versuche der U.S. Army mit einem
Flügel, der sich während des Fluges beträchtlich vergrößern läßt.
Leider sind über die entsprechende Grafik hinaus keine weitern Detaisl über die teleskopischen Flügel zu finden. Es scheint damals jedoch praktische Versuche mit einer einmotorigen Maschine gegeben zu haben. Ich erwähne diese Technologie an dieser Stelle, da sie viele Jahre später wieder eine Rolle spielen wird, insbesondere im Bereich kleiner Drohnen.
(Grafik)
Einen ideellen Elektroflug-Vorläufer
bildet
das US-Patent Nr. 2.368.639 von Stanley Bizjak aus
Crivitz, Wisconsin, aus dem Jahr 1945, bei dem es
um einen elektrisch betriebenen Gleiter geht.
Der Erfinder beantragt das Patent bereits 1943, und aus der Beschreibung geht hervor, daß sein Elektroflieger neben Batterien teilweise auch mit Benzin angetrieben werden sollte. Über eine Realisierung ist jedoch nichts bekannt.
Aus dem Jahr 1951 ist ein weiterer Vorläufer bekannt,
der von dem Deutschen Walter Otto Galonska gebaut wird.

(1951)
Das in der US-Presse als ,Fliegende Untertasse’ bezeichnete Grät ist mit zwei gegenläufigen Propellern ausgestattet, von einem Schutznetz umgeben und mit einem Stahlkabel am Boden verankert, da es den Deutschen zu diesem Zeitpunkt noch nicht (wieder) erlaubt ist, freifliegende Gerätschaften in die Luft zu bringen.
Leider ist es mir bislang noch nicht gelungen, weitere Details über diese Pioniertat herauszufinden. Der Erfinder soll ein Jahr zuvor - mit stillschweigendem Einverständnis der US-Besatzer - auch an einem großen Hubschrauber gearbeitet, dessen Idee er schon in den letzten Kriegstagen gehabt hatte. Über weiterführende sachdienliche Hinweise würde ich mich shr freuen.
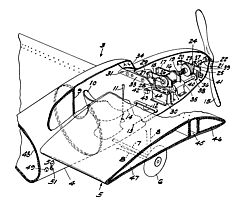
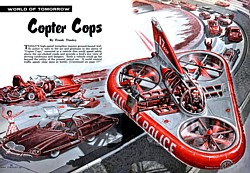
Auch eine Vision vom November 1958 soll
erwähnt werden, in der sich das US-Magazin Mechanix Illustrated vorstellt,
wie die Polizei der Zukunft aussehen könnte. Um schnell zu einer Unfallstelle
zu kommen, setzen die ‚Copter Cops‘ ein VTOL mit einem Jet-Vorschub
und drei großen Mantelgebläsen mit jeweils einem Paar gegenläufiger
Propeller ein.
(Grafik)
Der Flugkörper in der Illustration des legendären Retro-Future-Künstlers Frank Tinsley basiert auf den Spezifikationen der US-Army für einen kompakten, auftriebsstarken Hubschrauber-Luftjeep, der durch zwei Gasturbinen angetrieben wird.
Die tatsächlich gebaute ‚fliegende Plattform‘ (winged platform) für eine Person, auf die sich der Artikel bezieht, wurde Mitte der 1950er Jahren zwar von der Navy getestet, erreichte letztlich aber nie das Schlachtfeld, da sie als unpraktisch betrachtet wurden. Was Tinsley nicht davon abhielt, sich vorzustellen, wie sie für die Zukunft modifiziert werden könnte.
Unter dem Titel ‚First Flying Platform - 1955 Hover Board‘ findet sich im Netz übrigens ein kurzes Video mit dem damaligen Bericht von British Pathé.
Elektrisch zu fliegen geht aber auch ohne
Batterien oder Kabel. Im Jahr 1959 macht
der US-amerikanische Elektrotechniker William C. Brown den
Vorschlag, einen mittels Mikrowellen mit Energie versorgten
unbemannten Hubschrauber auf 1.500 m Höhe zu bringen,
um als Kommunikations- und Erkundungsplattform für das U.S. Departement
of Defense eingesetzt zu werden. Damit beginnt das Projekt Raytheon
Airborne Microwave Platform (RAMP) zur Entwicklung von drahtlos betriebenen
Drohnenflugzeugen.
Im Jahr 1961 publiziert Brown sein Verfahren zur Energieübertragung mittels Mikrowellen (microwave power transmission, MPT), das er dann 1964 in der Fernsehschau CBS Evening News von Walter Cronkite anhand eines Modell-Hubschraubers demonstriert. Das weltweit erste drahtlos angetriebene Luftfahrzeug ist mit mit 3.000 Rectennas ausgestattet, welche den empfangenen 2,45 GHz Mikrowellenstrahl in Elektrizität umwandeln.

Hubschrauber-Versuch
Eine Rectenna ist die Kombination aus einer Antenne und einem Gleichrichter (rectifying antenna, gleichrichtende Antenne). Das Patent dafür beantragt Brown 1965 (US-Nr. 3.434.678, erteilt 1969). Da diese frühen Rectennas noch zu schwer sind, um im praktischen Flugbetrieb eingesetzt zu werden, wird das von der U.S. Air Force finanzierte Projekt jedoch nicht weiter verfolgt.
Erst als der aus Böhmen stammende amerikanische Wissenschaftler und Raumfahrtingenieur Peter Eduard Glaser im Jahr 1968 einen solar-betriebenen Satelliten vorschlägt und patentiert, der Mikrowellen zur Erde sendet (s.u. Satellitenkraftwerke), beschäftigt sich Brown erneut damit, diese Idee zu realisieren. 1971 beginnt er gemeinsam mit Kollegen der Grummann Aerospace Corp. und der Firma Textron, das Konzept ernsthaft zu untersuchen. Im Jahr 1973 stößt dann auch die NASA hinzu. 1974 meldet Brown ein entsprechendes Patent unter dem Titel ,Space oriented microwave power transmission system’ an (US-Nr. 3.989.994, erteilt 1976).
Als Technischer Direktor des Jet Propulsion Laboratory von Raytheon gelingt es ihm gemeinsam mit Robert Dickinson im Jahr 1975 eine Mikrowellenleistung (2,4469 GHz) von 475 W (andere Quellen: 495,6 W) über eine Entfernung von 1,6 km zu übertragen und dabei einen Wirkungsgrad von 54 % zu erzielen.
Als Rekord für eine nutzbar zurückgewonnene elektrische Leistung wird bei den Experimenten eine Gleichstrom-Ausgangsleistung von 34 kW bei einer Entfernung von 1,55 km erreicht (2,388 GHz). Dabei werden die Mikrowellen aus einer 26 m durchmessenden Schüssel zu einem 7,3 x 3,5 m großen Array aus GaAs-Dioden-Rectennas übertragen, das eine durchschnittliche Effizienz von 82,5 % aufweist. Ein einzelnes, von Bill Brown entwickeltes Rectenna-Element zeigt sogar einen Wirkungsgrad von 91,4 %. Die drahtlose Übertragung von Energie wird ausführlich im Kapitelteil WiTricity behandelt (in Arbeit).
Im Jahr 1982 geben Brown und James F. Trimer von der NASA die Entwicklung einer Dünnfilm-Plastik-Rectenna bekannt, die nur ein Zehntel so viel wiegt wie die früheren Modelle und sich zudem mit einer gedruckten Leitertechnik herstellen läßt. Dies macht eine Anwendung bei Flugzeugen viel attraktiver.
Die Entdeckung fällt genau mit dem Beginn des Programms Stationary High Altitude Relay Platform (SHARP) des kanadischen Communications Research Center (CRC) zusammen, dessen Idee erstmals 1980 konzipiert worden war. Hierbei soll ein kleines Flugzeug Relais-Signale innerhalb eines Durchmessers von 600 km zwischen Punkten auf der Erde weiterleiten, ähnlich einem Kommunikationssatelliten. Angetrieben von einer an den Unterseite des Flugzeugs angebrachten Rectenna-System könnte es in einer Höhe von 21 km fliegen und monatelang dort bleiben.
Da die Form und der Leistungsbedarf eines solchen Flugzeuges unklar ist, führt die Firma SED Systems aus Saskatoon im Jahre 1981 eine entsprechende Studie durch. Die Gerätekonfigurationen werden von John Martin und Prof. James DeLaurier vom University of Toronto Institute for Aerospace Studies (UTIAS) untersucht.
Das CRC-Team unter der Leitung von R. E. Barrington schätzte, daß das Flugzeug etwa 100.000 $ kosten würde, während die Betriebskosten mit 2 – 3 Mio. $ im Jahr veranschlagt werden. Im Gegensatz dazu kostet das Starten eines Satelliten etwa 150 Mio. $. Darüber hinaus könnte das Flugzeug für die Wartung und Upgrades regelmäßig auf den Boden zurückkehren, so daß es auf unbestimmte Zeit zu betreiben ist, während ein Satellit eine Lebensdauer von etwa 10 Jahren hat. Ein elektrisch angetriebenes Ultraleichtflugzeug scheint daher die bessere Lösung zu sein.

SHARP würde ein 80 m durchmessendes Array aus kleinen Parabolschüsseln nutzen, um dem Flugzeug von der Bodenstation mittels 5,8 GHz Mikrowellen 500 kW Leistung zu liefern, welche für die Nutzlast- und Steuerungssysteme verwendet werden, um den Standby-Energiespeicher zu laden und um die Elektromotoren der beiden Propeller mit großem Durchmesser zu versorgen, welche das Flugzeug oben halten. Auf dessen Flughöhe ist der Strahl auf einen Bereich fokussiert, der nur etwas größer ist als das Flugzeug selbst. Da dieses in einem etwa 2 km großen Kreis fliegt, muß der Strahl am Boden um nur ein paar Grad nachgesteuert werden.
Unter der Leitung von George W. Jull (bis 1986) beginnt das UTIAS im Jahr 1982 mit dem Entwurf und Bau eines leichten Modellflugzeugs mit einer Spannweite von 1,3 m, wie ihn die SED Systems empfohlen hatte. Der Prototyp namens SHARP-5, der anfangs von einem kleinen Benzinmotor angetrieben wird, weist allerdings mehrere aerodynamische Probleme auf, was zu einem verbesserten Design namens SHARP-6B führt, bei dem der horizontale Stabilisator in einer Canard-Konfiguration zur Vorderseite des Flugzeugs verlagert ist (dieses Modell wird inzwischen im Nationalmuseum in Ottawa ausgestellt).
Anschließend wird der Prototyp am CRC mit experimentellen Rectennas ausgestattet. Unter der Leitung von Joe Schlesak, der zuvor für die Untersuchung der Mikrowellenen-Ergieübertragung verantwortlich war und 1986 Jull ablöst, wird eine Bodenstation entworfen und bei CRC konstruiert, um die notwendige Mikrowellenleistung bereitzustellen.

den SHARP-6B
Während der Jahre 1982 und 1983 wird yudem die Entwicklung von leichten Dünnschicht-Rectennas von Adrian Alden und Tom Ohno intensiv vorangetrieben. Dies führt zur Patentierung bestimmter Konfigurationen von Gleichrichterantennensystemen, die für die besonderen Leistungsanforderungen, wie sie sich für das kreisende SHARP-Flugzeug darstellen, gut geeignet sind. Gleichzeitig untersuchen Jull, Schlesak und Arne Lillemark im Auftrag der Firma Miller Communication Systems die bodengestützte Energieerzeugung und -übertragung.
Von 1982 bis 1986 führt Lillemark analytische Studien durch, um die Wirtschaftlichkeit der Bereitstellung einer breiten Palette von Telekommunikations- und Rundfunkdienstleistungen für Regionen in ganz Kanada zu bestimmen. Von CRC-Mitarbeitern und Beraterunternehmen wird zudem zwischen dem Februar 1984 und dem März 1985 unter der Leitung von Edward Hayes eine umfassende und systematische Durchführbarkeitsstudie durchgeführt.
Dabei wird eine radikal neue Flugzeugkonfiguration identifiziert und auch patentiert, die die einen optimalen Kompromiß zwischen der Minimierung der Leistungsdichte des Mikrowellenstrahles und einer hohen aerodynamischen Effizienz verspricht. Ein wesentliches Merkmal ist die Positionierung und Form der 1 m großen Scheibe, die mit den gedruckten Rectennas bedeckt ist und sich genau hinter den Flügeln befindet. Weitere Rectennas sitzen unter dem Rumpf und den Flügeln.
Die geplante Endversion ist für eine Fluggeschwindigkeit von 190 km/h in 21 km Höhe ausgelegt, soll eine Spannweite von 40 m und einen Scheibendurchmesser von rund 9 m aufweisen und über 100 kg Nutzlast mitführen können. Die rund 10.000 Rectennas würden von einem 500 kW Mikrowellenstrahl versorgt werden, von dem etwa 30 kW bei den Motoren ankommen soll.

Die Studien gipfeln in der Entscheidung, ein Flug-Demonstrator-Modell im Maßstab 1:8 zu entwickeln. 1985 und 1986 folgen am UTIAS Analysen und Windkanalstudien durch Prof. DeLaurier und seine Studenten, und 1987 beginnt der Bau eines SHARP-Fliegers mit einer Spannweite von 4,5 m und einem 0,5 PS Elektromotor. Die Energie für den Start wird durch NiCd-Batterien bereitgestellt, bis eine genügende Höhe erreicht ist, um den aus einer 4,5 m durchmessenden Parabolantenne gesendeten Mikrowellenstrahl zu erfassen und ab diesem Punkt selbstversorgt weiter zu fliegen.
Mitte 1987 sind das Flugzeug und das Bodenkraftwerk so weit entwickelt, daß ein anhaltender, mikrowellengesteuerter Flug unmittelbar bevorsteht, als das Schicksal interveniert – in Form einer nistenden Feldmaus, die hierfür Teile der Flugzeugstruktur nutzt, sich durch das Balsaholz frißt und das Flugzeug schwer beschädigt. Die erforderlichen Reparaturen verzögern die Flugversuche für sechs Wochen.
Im September 1987 kann dann am CRC endlich der ferngesteuerte Erstflug des Prototypflugzeugs statfinden, wobei das System wie erwartet funktioniert und kurz nach dem Batterie-Start auf die 10 kW des 2,45 GHz Senders umschaltet. Im Oktober wird die anfängliche 20-minütige Flugzeit auf über eine Stunde verlängert, daran anschließend sind noch wesentlich längere Flüge geplant – doch es kommt anders.
Die erfolgreiche Entwicklung wird 1988 zwar mit einem Ehrendiplom der Internationalen Aeronautische Vereinigung (FAI) ausgezeichnet, aber die Verringerung des kanadischen Forschungsbudgets führt letztlich dazu, daß die geplanten Flüge nie stattfinden. Die Arbeiten werden später an der Kyoto University in Japan fortgesetzt (s.u.). f0008a_black_beauty_scanner.jpg
(Grafik)
Das vermutlich erste Patent, das eine der später weit verbreiteten Quadcopter-Drohnen beschreibt, wird von Edward G. Vanderlip, einem Ingenieur der Piasecki Aircraft Corp., im Jahr 1962 erteilt (‚Omni-directional, vertical-lift, helicopter drone‘, US-Nr. 3053480, beantragt 1959).
Vanderlip entwickelte zunächst eine Möglichkeit, die Instrumente eines Hubschraubers bei einem Stromausfall weiter funktionieren zu lassen, und hat dann die Idee, pilotenfreundliche Flugsysteme in ein kleines, ferngesteuertes Drehflugzeug einzubauen. Sein Patent beschreibt eine „extrem einfach zu fliegende“ Drohne mit vier paarweise an gegenüberliegenden Enden angeordnete Auftriebsrotoren, so daß die vertikale Neigungsachse immer senkrecht zum Boden steht. Dadurch kann das Flugzeug seine Rotoren kippen und in jede Richtung fliegen.

Ein fiktiver Vorläufer der späteren Drohnen erscheint in der US-amerikanischen
Krimiserie The Green Hornet, die 1966 und 1967 produziert
wird. In dieser führt Britt Reid ein geheimes Doppelleben.
In der Öffentlichkeit ist er ein Playboy und Zeitungsverleger, während
er in seiner geheimen Identität als ,Grüne Hornisse’, mit einer Maske
getarnt und von seinem Chauffeur und Gehilfen Kato (Bruce
Lee) unterstützt, das Verbrechen bekämpft.
Neben Katos Kampfkunst kann Reid auch auf seinen schwerbewaffneten und mit allerlei technischen Spielerein ausgestatteten Wagen Black Beauty zählen. Das damals wohl ungewöhnlichste Gerät versteckt sich im Kofferraum: Von dort kann der Scanner aufsteigen, eine kleine helikopterartige Drohne, um Ziele zu überwachen und abzuhören. Es ist allerdings fraglich, ob der Scanner tatsächlich flugtauglich war – und nicht nur ein vorausschauender Film-Trick.

Die 1971 in Haid bei
Linz/Donau in Österreich gegründete Firma HB Brditschka,
deren Inhaber
Heinz W. Brditschka in den 1960er Jahren
einige Exemplare des von Fritz Raab konstruierten
und für den Amateurbau vorgesehenen Motorsegler Krähe gefertigt
und gemeinsam mit seinem Sohn Heino später
zum HB-3 weiterentwickelt
hatte, baut 1973 in
Zusammenarbeit mit dem Modellbauer Fred Militky eine
modifizierte Version namens MB-E1, mit welcher Brditschkas
Sohn im Oktober den
weltweit ersten Flug eines manntragenden Elektroflugzeuges durchführt.

(Detail)
Das spartanisch ausgerüstete Cockpit besitzt im Wesentlichen nur einen Schalter, mit dem der Elektromotor ein- und ausgeschaltet wird. Die Spannweite des 1-Mann-Fliegers beträgt 12 m, seine Länge 8 m.
Ausgestattet mit einem 8 kW Elektromotor der Firma Bosch (andere Quellen: 10 kW) und 2,4 kWh Nickel-Cadmium-Akkumulatoren von VARTA mit einem Gesamtgewicht von 125 kg erfolgt der Erstflug am 21. Oktober in Wels bei Linz – und wird noch viele Jahre lang im Guinness-Buch der Rekorde aufgeführt.
Nach kurzer Rollphase steigt der Flieger aus eigener Kraft auf eine Höhe von 300 - 360 m und erreicht eine Geschwindigkeit von 139 km/h. Zur Länge des Fluges variieren die Angaben zwischen 9 und 14 Minuten.

(Neuaufbau)
Allerdings sind die Möglichkeiten der damaligen Batterietechnik mit der kurzen Platzrunde weitgehend ausgereizt und das Projekt wird nicht weiterverfolgt. Die Zelle der MB E1 kommt ins Luftfahrt-Museum nach Graz und verstaubt dort rund zwanzig Jahre lang in einer verborgenen Ecke. Das Hobby von Vater und Sohn Brditschka entwickelte sich allerdings weiter zu dem Hersteller und Dienstleister HB-Flugtechnik, der noch heute besteht.
Der MB-E1 wird Jahre später von einem Studententeam der FH Joanneum-Aviation in Graz neu aufgebaut und 2017 der Öffentlichkeit vorgestellt, als er seinen zweiten ‚Rollout‘ am Luftfahrt-Museum Graz-Thalerhof erfährt. Zudem kann inzwischen auf sketchfab.com ein 3D-Modell des Fliegers betrachtet werden.
Neben dieser Pioniertat gibt es sicherlich noch weitere, bislang
nicht gefundene Ansätze, denen ich mit der Zeit hoffentlich
auf die Schliche kommen werde.
Ende 2008 werden weltweit jedenfalls schon über 60 Projekte im Bereich des Elektrofluges verfolgt, die über die weitverbreiteten kleinen und mit Batterien betriebenen Modellflugzeuge hinausgehen. Seitdem nimmt die Zahl kontinuierlich weiter zu.
Die wichtigsten dieser Entwicklungen werden im Folgenden präsentiert - wobei den von Elektromotoren angetriebenen Paraglidern ein eigenes Kapitelteil gewidmet ist (s.d.).
Die Mitglieder der Akaflieg Stuttgart, einem bereits 1926 gegründeten
studentischen Verein an der Universität Stuttgart,
bauen zwischen 1972 und 1975 mit
der fs29 das bisher einzige Segelflugzeug der Welt,
das seine Spannweite im Flug verändern kann. Auch
wenn es sich dabei nicht um ein solare oder elektrisch betriebenes
Fluggerät handelt, halte ich diese Entwicklung für interessant genug,
um hier aufgeführt zu werden.
Der 7,16 m lange Segler mit einem Leergewicht von 357 kg und einem maximalen Fluggewicht von 450 kg kann seine Spannweite von 13,3 m auf 19 m strecken, was die Flügelfläche von 8,56 m2 auf 12,65 m2 vergrößert. Der Erstflug erfolgt im Juni 1975. Nach einem Unfall im Sommer 1997 wird das einzige Teleskopflugzeug der Welt wieder aufgebaut und ist mittlerweile im Deutschen Museum in München besichtigen.
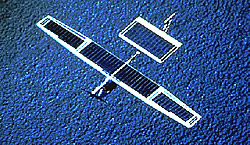
Das erste Solarflugzeug der Welt ist 1974 das
unbemannte Versuchsflugzeug Sunrise I von AstroFlight
Inc. – das
Unternehmen erhält über Lockheed einen entsprechenden ARPA-Auftrag.
Das Flugzeug hat eine Spannweite von 9,6 m und wiegt knapp 12 kg, und
die über 1.000 Solarzellen auf der Tragfläche entwickelten
eine Spitzenleistung von etwa 450 W. An einem klaren Sommertag erreicht
das Flugzeug eine Gipfelhöhe von 6.000 m, wird bei einem Sturm
allerdings beschädigt. Astro Flight erhält den Auftrag, eine
verbesserte Version zu entwickeln, die nach nur drei Monaten Bauzeit
im November 1974 zum ersten mal startet.

Gegenüber seinem Vorläufer weist das Sunrise II dann schon diverse Verbesserungen auf. Bei 9 m2 Gesamttragfläche wiegt das funkferngesteuerte Flugzeug nur noch rund 10 kg, besitzt aber 4.480 Solarzellen, die insgesamt nur knapp 1,8 kg wiegen und 600 W Maximalleistung lieferten. Die erreichbare Gipfelhöhe wird zwar auf 21.000 m im Sommer bzw. 13.000 m im Winter geschätzt, tatsächlich werden aber nur 6.000 m erreicht.
In Deutschland startet im August 1976 mit dem Modellflugzeug Solaris das
erste privat gebaute Solarflugzeugmodell. Aufgrund der fast unerschwinglichen
Solarzellenpreise begnügt sich der Modellbauer Fred
Militky mit
10 W, die auf einer ebenen Platte über dem Rumpf befestigt sind.
Bei einer Spannweite von 2,06 m wiegt das Flugzeug nur 413 g und kann
Steigflüge von je 150 Sekunden Dauer durchführen, die es
auf eine Höhe von immerhin 50 m bringen. Fred Militky stirbt
jedoch, bevor er weitere Versuche durchführen kann.
Ebenfalls aus dem Jahr 1976 stammt die Abbildung
eines Roboter-Hubschraubers, der im September auf
der Farnborough Air Show in Hampshire, England, eine kleine Sensation
darstellt. Der ferngesteuerte Wisp ,Spion-im-Himmel’-Hubschrauber
wurde von der britischen Firma Westland Helicopters für
die Armee und die Polizei zu Luftüberwachung entwickelt und kann für
die Übertragung von Fernsehbildern zurück zur Basis ausgerüstet werden.

Obwohl das Gerät nicht elektrisch angetrieben wird, soll es hier erwähnt werden, da es als Vorläufer vieler späterer, ähnlicher Systeme gilt. Als Einsatzfelder werden sowohl die Unterstützung von Sicherheitskräften gesehen, die in Grenzgebieten patrouillieren, als auch zivile Rollen bei der Verfolgung von Waldbränden oder der Verkehrsüberwachung.
Ein Vorgänger war der ab 1974 entwickelte experimentelle Hubschrauber WG.25 Mote, der das Grundkonzept für ein funkferngesteuertes, vollständig kontrollierbares Gerät beweisen sollte und erstmals im Juni 1975 geflogen ist, angetrieben von zwei Zweitakt-Kolbenmotoren. Nach dem Wisp entwickelt Westland zwei weitere Drohnenhubschrauber: den ähnlich angetriebenen, 125 kg schweren Wideye im Jahr 1977, der koaxiale Rotoren von 2,3 m Durchmesser besitzt, sowie den Sharpeye von 1983, der das endgültige Design der VTUAV (Vertical Takeoff Unmanned Air Vehicle) Familie darstellt, bevor das Programm abgebrochen wird.
Sowohl der Wisp als auch der Wideye sollen in kleinen Zahlen hergestellt worden sein, gelangten aber nicht in die Großproduktion. Andere Quellen besagen, daß nur drei Prototypen des Wisp gebaut worden sind. Bei der Recherche stellt sich zudem heraus, daß die deutschen Dornier-Werke GmbH (die aus der Zeppelin Werk Lindau GmbH entstanden sind) schon ab 1966 zwei Versionen gefesselter Rotorplattformen des Typs Kiebitz konstruiert haben, die ebenfalls als mobile unbemannte Aufklärungsplattformen für militärische Zwecke gedacht sind.
Das erste bemannte Flugzeug, das mittels Solarenergie zu fliegen imstande ist, ist das
ultraleichte Nurflügel-Doppeldecker-Elektroflugzeug Mauro
Solar Riser
von Larry Mauro, dem Chef der US-Firma Ultralight
Flying Machines,
der hierfür einen UFM Easy Riser Hängegleiter mit Solarzellen von 350
W Leistung, einer Hughes
500 Hubschrauber-Batterie und einem 3 PS starken Elektromotor bestückt.

Im April 1979 gelingt dem Solar Riser auf dem Flughafen Flabob in Riverside, Kalifornien, der weltweit erste akkugestützte, manntragende und voll steuerbare Solarflug in etwa 12 m Höhe über eine ca. 800 m weite Strecke mit anschließender sanfter Landung. Nach einer Aufladezeit von mindestens eineinhalb Stunden kann der Flieger 3 – 5 Minuten lang fliegen, was ausreicht, um genügend Höhe für einen anschließenden Gleitflug zu erreichen. Es folgt eine Reihe weiterer Flüge von ähnlicher Höhe und Dauer.
Da der Solar Riser leicht genug ist, um praktisch endlos zu gleiten und dabei die Batterie mit Sonnenenergie nachzuladen, kann sich der Pilot darauf beschränken, den Motor zum Start und zur Landung einzusetzen, mit einem langen Gleitflug dazwischen. Pläne für den Ausbau und die Erhöhung der Anzahl der Zellen, damit Flüge nur mit Solarenergie und ohne Batterieleistung vorgenommen werden können, werden nicht vollendet. Noch 1979 spendet Mauro das Solarflugzeug dem EAA AirVenture Museum in Oshkosh, Wisconsin.
Bereits
1977 beginnt Frederick ,Freddie’
E. To, ein Mitglied
des Kremer-Preiskomitees für Muskelkraft-Flüge (s.d.),
gemeinsam mit David Williams mit dem Bau eines entsprechenden Fliegers,
der sich mit einem Gewicht von 104 kg aber als zu schwer herausstellt,
um rein mit Menschenkraft geflogen zu werden – worauf daraus das
solarbetriebene Flugzeug Solar One entsteht, das
nach dem unbemannten Sunrise I von AstroFlight und dem bemannten
Mauro Solar Riser als das weltweit dritte Solarflugzeug gilt.

Das durch die Firma Solar-Powered Aircraft Developments hergestellte 6,71 m lange Flugzeug mit einer Spannweite von 20,73 m und einer Flügelfläche von 24 m2 wird mit vier 1 kW/36 V Permanentmagnet-Elektromotoren von Bosch, 750 Solarzellen und einem einem 25 Ah Nickel-Cadmium-Akku von 29 kg Gewicht ausgestattet, die einen Anstieg von acht Minuten plus zwei Minuten Flug erlauben. Der aus Holz bestehende 2-Blatt-Propeller hat einen Durchmesser von 160 cm.
Die Solar One wird eigentlich entwickelt, um ausschließlich mit Sonnenenergie zu fliegen, doch bei einem Projektbudget von 16.000 £ können nicht ausreichend viele Solarzellen gekauft werden. Daher werden die auf den Flügeln installierten Zellen, die mit 6.000 £ sowieso schon den teuersten Teil des Flugzeugs bilden, dazu verwendet eine Batterie aufzuladen, die wiederum die Energie liefert, um das Flugzeug anzutreiben.
Gut ein Jahr später, im Dezember 1978, in den frühen Morgenstunden, bei Kälte und mit Eis auf dem Flügel, macht die Solar One auf dem Flugplatz Lasham in Hampshire ihren ersten kurzen Sprung. Der offizielle Jungfernflug (für die Presse) von 1,2 km Weite erfolgt mit Ken Stewart am Steuer allerdings erst im Juni 1979 - weshalb das Flugzeug in der zeitlichen Reihenfolge auch als das Dritte genannt wird. Bei einem zweiten Flug am selben Tag erreicht der Pilot Bill Maidment eine Geschwindigkeit von 78 km/h. Ein beabsichtigter Flug über den Ärmelkanal wird allerdings aufgegeben, da das Flugzeug nicht die beabsichtigte Ausdauer erreicht.
Heute ist die Solar One im Deutschen Museum in München zu besichtigen.
Die 1971 von
dem Ultraleicht-Flugzeugpionier Paul MacCready im
kalifornischen Monrovia gegründete Firma AeroVironment
Inc. ist
auch an der Entwicklung der nachfolgend beschriebenen Flugzeuge Solar
Challenger, Pathfinder und Pathfinder-Plus sowie
dem Helios-Prototypen beteiligt. Ende
der 1970er ist einer der Partner des Unternehmens
die Firma Dryden, die später das Environmental Research Aircraft
and Sensor Technology (ERAST) Programm der NASA leiten wird (s.u.).

Paul MacCready ist Gewinner der beiden Henry-Kremer-Muskelkraftflug-Preise 1977, als sein Flugzeug die liegende 8 schafft, sowie 1979, als mit dem Gossamer Albatros II die Überquerung des Ärmelkanals gelingt. Er stirbt hochgeehrt im August 2007.
1980 startet mit dem Gossamer Penguin ein weiteres bemanntes Solarflugzeug. Es ist ein Umbau des zuvor nur mit Muskelkraft betriebenen Gossamer Albatross II, der nun mit dem Solargenerator der Sunrise II von Astro Flight ausgerüstet wird, da dessen Designer Robert J. Boucher an dem Projekt als Berater beteiligt ist.
Der Vorläufer Gossamer Condor war 1977 eines der ersten erfolgreich muskelbetriebenen Flugzeuge überhaupt. AeroVironment verkleinert den Gossamer Albatross II auch auf ein dreiviertel der ursprünglichen Größe, da das Dryden Flight Research Center der NASA bei Versuchsflügen am Langley Research Center in Hampton mit einem kleinen Elektromotor schon gute Resultate erreicht hatte.
Da dieser nur 600 W Spitzenleistung liefert, ist das Flugzeug auf den Bodeneffekt angewiesen und kann nur ca. 4 m hoch fliegen. Außerdem ist die Manövrierfähigkeit eingeschränkt, da der Solargenerator stets genau auf die Sonne ausgerichtet sein muß. Der erste batteriebetriebene Testflug erfolgt am 07.04.1980 auf dem Shafter Airport nahe Bakersfield, Kalifornien, und der erste solarbetriebene am 18.05. – Pilot ist jeweils Marshall, der 13-jährige Sohn von MacCready. Im Juli übernimmt Dryden das Projekt.
Die Erfahrungen der AeroVironment mit dem Gossamer Penguin fließen in die Entwicklung des Solar Challenger ein, der von DuPont gesponsert wird. Die Firma liefert auch für andere Solarflugzeuge fortschrittliche Materialen.
Der Erstflug des Solar Challenger, der als erstes richtiges Solarflugzeug bezeichnet wird, erfolgt Ende 1980. Er erreicht Flughöhen von mehreren tausend Metern, hat die Fähigkeit, auch längere Flugstrecken zu bewältigen, und ist voll manövrierbar. Zur optimalen Leistungsanpassung wird ein Verstellpropeller eingesetzt, und die Steuerung erfolgt durch eine Gewichtsverlagerung des Piloten.
Mit diesem Solarflugzeug gelingt dem Piloten Stephen R. Ptacek am 07.07.1981 die Überquerung des Ärmelkanals, wobei er in einer Zeit von 5:23 h eine Strecke von 163 Meilen zurücklegt und dabei eine Flughöhe von über 3.000 m erreicht. Der Flug geht vom Corneille-en-Verin Flugplatz nördlich von Paris bis zur Manston Royal Air Force Base im Süden Londons. Einzigartig ist auch wohl, daß diesem Flug ein langes Gedicht gewidmet wurde: ,The Flight of the Challenger’ von Astro-Flight-Chef Robert J. Boucher, der auf der 21st SAE, ASME, and ASEE, Joint Propulsion Conference 1985 mit seinem Projekt Starduster ein weiteres solarbetriebenes Höhenflugzeug vorschlägt, das allerdings nie gebaut wird.

Der Solar Challenger, hat eine Spannweite von 14,8 m und eine Länge von 9,22 m. Die Startmasse beträgt aufgrund der von DuPont gelieferten superleichten Materialien nur 152,8 kg, die Zuladung bzw. der Pilot darf maximal 67,5 kg wiegen. DuPont unterstützt den Bau außerdem mit 60.000 $. Mit den von der NASA ‚geliehenen’ 16.128 Solarzellen und einer Solar- bzw. Motorleistung von jeweils 2,7 kW erreicht das Solarflugzeug eine Fluggeschwindigkeit von bis zu 55 km/h.
Ab 1981 finanziert die US-Regierung das Projekt eines solarbetriebenen ultrahoch und langfristig fliegenden Elektroflugzeugs, und AeroVironment entwickelt den Nurflügler HALSOL (High-Altitude SOLar), von dem allerdings nur ein batteriebetriebener Prototyp gebaut wird, da bei seiner Erprobung keine zufriedenstellenden Resultate erzielt werden. Der Prototyp wird eingemottet.
Im Laufe des Jahres 1998 wird der Pathfinder in die mit 36,6 m beträchtlich längerflügelige Konfiguration Pathfinder-Plus umgebaut, die im August auf eine Rekordhöhe von rund 24,4 km fliegt. 2001 stellt der Pathfinder-Plus mit 29,5 km einen neuen Höhenrekord unter den geflügelten Flugzeugen ohne Düsentriebwerke auf und im Juli 2002 fliegt er mehrere Demonstrationsflüge, um den praktischen Nutzen für kommerzielle Zwecke zu bestätigen. Bei einer weiteren Demonstration im September schwebt der Solarflieger auf einer von der NASA gesponserten Bildgebungsmission zur Optimierung der Kaffeeernte in die Höhe.
Im Jahr 1983 beginnt auch in Deutschland die Geschichte
des bemannten Solarflugs. Der autodidaktische Extremleichtbau-Spezialist Günther
Rochelt, Inhaber mehrerer noch immer ungebrochener Weltrekorde
im Bereich des Muskelfluges, nutzt das Schweizer Serien-Segelflugzeug
in ‚Enten-Konfiguration’, die Canard – 2FL,
um daraus die Solair I zu basteln.

Der Vorteil dieser Konstruktion mit einem Höhenleitwerk vorne liegt darin, daß dieses beim Steigen zum Auftrieb beiträgt. Die deutsche Industrie verweigert Rochelt die Hilfe – dafür wird er später von der US-amerikanischen Firma Solarex unterstützt. Das Flugzeug hat eine Länge von 5,40 m, eine Spannweite von 16 m und ein Leergewicht von 120 kg. Seine maximale Geschwindigkeit beträgt 28 km/h.
Tragfläche und Höhenleitwerk werden mit exakt 2.499 Solarzellen ausgestattet, die eine Leistung von 2,2 kW erbringen, außerdem wird die Spannweite verlängert, um mehr Auftrieb und mehr Platz für den Solargenerator zu gewinnen. Sogar die Ruderklappen werden mit Solarzellen bestückt. Für den Vorschub sorgt ein Heckpropeller. Günther Rochelt stellt am 21.08.1983 mit 5:41 h einen Dauerflugrekord für Solarflugzeuge auf. Die Oskar Ursinus Vereinigung verleiht dem Flieger den Preis für die fortschrittlichste Konstruktion. Die Solair I steht heute im Deutschen Museum in München.
Die NASA beginnt 1985 mit der Arbeit an dem Projekt
Solar HAPP (High Altitude Powerd Platform), bei dem ein Robot-Flugzeug
in 20 km Höhe über ein Jahr lang mit einer Geschwindigkeit
von 110 km/h nonstop im Luftraum kreuzen soll. Lockheed kooperiert
bei diesem Projekt u.a. auch mit dem US-Landwirtschaftsministerium,
man plant einen Elektroflieger mit einer Spannweite von 98 m und einem
Gewicht von 900 kg. Bis zu 6 m durchmessende Propeller sollen das Flugzeug
mit einem 15 PS Motor auf 147 km/h Spitze beschleunigen – als
Nachtflugreserve denkt man an Brennstoffzellen. Die Alternative eines
Mikrowellen-Antriebs wird bald fallengelassen, da sie den Flugradius
auf den Bereich des Senders begrenzt.
Einen Langstreckenrekord über
24.986 Meilen stellt im Dezember 1986 der Model
76 Voyager
von Burt und Dick Rutan auf, der
von zwei Piloten abwechselnd gesteuert ohne nachzutanken in neun Tagen
auf einer durchschnittlichen Höhe von 3.350 m einmal um die Erde
fliegt – allerdings konventionell mit Flugbenzin angetrieben.

(Grafik)
Da sich die technologische Entwicklung in den späteren Jahrzehnten u.a. auch auf Hybrid-Flugzeuge konzentrieren wird – oftmals auf Grundlage von Wasserstoff-Turbinen und/oder entsprechenden Brennstoffzellen –, muß an dieser Stelle die Tupolev erwähnt werden, die Mitte April 1988 ihren ersten Flug mit Flüssigwasserstoff absolviert.
Der Prototyp Tu-155 basiert auf einer Serien-Tu-154B für 150 – 180 Passagiere, deren rechtes Triebwerk aber nicht von Kerosin, sondern von Wasserstoff oder dem in Russland günstig verfügbaren Erdgas angetrieben wird. Hierfür bekommt das Flugzeug mit dem Kennzeichen CCCP-85035 einen großen Wasserstoff-Tank im hinteren Teil der Passagierkabine, der etwa ein Drittel des Raumes einnimmt. Insgesamt 30 zusätzliche Systeme werden in dem Flieger verbaut, damit er mit Wasserstoff betrieben werden kann.
Der Erfolg mit erfolgt im Januar 1989. Insgesamt absolviert die Maschine mehr als 100 erfolgreiche Testflüge, darunter auch nach Frankreich und Deutschland, bevor sie auf dem Flughafen Zhukovsky, nahe Moskau, ihren Ruheplatz findet.

Die oben beschriebenen Arbeiten zur Entwicklung des Mikrowellen-betriebenen
SHARP-Flugzeugs werden Ende der 1980er Jahre vom Radio
Atmospheric Science Center an der Kyoto University in
Japan übernommen, wo Prof. Hiroshi Matsumoto ein ähnliches
Gerät entwickelt, das im August 1992 erstmals in die
Luft abhebt.
Im Vergleich zu SHARP weist das Microwave Lifted Airplane Experiment (MILAX) zwei neue Designmerkmale auf: Die Rectennas des Flugzeugs sind in den Flügeln und Schwanzflächen eingebettet, wodurch die Notwendigkeit für den separaten Antennen-Körper entfällt, und der Mikrowellen-Sender basiert auf einer aktiven, phasengesteuerten Gruppenantenne (Phased-Array-Antenna), die sich ohne physische Bewegung steuern läßt. Getestet wird das System, indem die Sendeantenne auf einen Kleinlastwagens montiert und umhergefahren wird, während der MILAX-Flieger folgt.
MILAX gilt als vorbereitendes Flugzeugexperiment für ein späteres Raketenexperiment namens Microwave Energy Transmission in Space (METS). Darüber findet sich mehr im Kapitelteil über Alternative Antriebe in der Raumfahrt. Das ebenfalls an der Kyoto University durchgeführte Projekt ETHER, bei dem im Jahr 2009 Mikrowellenleistung zum Betrieb eines Luftschiffs übertragen wird, beschreibe ich im Kapitelteil Solar-Luftschiffe und Solar-Ballone.
In den 1980er Jahren und zu
Beginn der 1990er Jahre untersucht die NASA verschiedene
Konzepte für selbständige, unbemannte Mars-Flugzeuge, darunter auch
welche, die mit Solarenergie betrieben werden sollen. Bislang ist jedoch
keines der damals entwickelten Modelle in die engere Planung übernommen
worden. (Im Jahr 2009 gilt ein von Raketen angetriebenes
UAV namens Ares als Favorit, es soll eng zusammengepackt
zum Mars geschafft werden und sich dort selbständig auf eine Spannweite
von 6,5 m ausklappen soll. Das UAV wird eine Spannweite von 6,5 m
haben und in einer Höhe von 1,6 km über der Marsoberfläche hochauflösende
Videoaufnahmen machen.)
Die Quellen belegen, daß es hier zudem eine Lücke von fast 10 Jahren gibt, in denen auf dem Sektor des Elektroflugs anscheinend nichts Relevantes mehr geschehen ist.

1993 wird der Nurflügler HALSOL wieder entmottet und für ein kurzlebiges Projekt der Ballistic Missile Defense Organization genutzt, wobei auch einige Solarpaneele zur Unterstützung der Batterien installiert werden.
Nach seiner Umbenennung in Pathfinder wird das Flugzeug mit einer Spannweite von 29,5 m im Jahr 1994 Teil des ERAST-Programms der NASA (Environmental Research Aircraft and Sensor Technology), bei dem ein sich selbststeuerndes und extrem hoch fliegendes Flugzeug entwickelt wird. 1995 wird der Pathfinder mit weiteren Solarzellen ausgerüstet, so daß seine sechs Motoren jetzt mit einer Leistung von 7,5 kW versorgt werden, und kommt für weitere Versuchsflüge zu Dryden zurück, wo es am 11. September eine Höhe von 50.500 Fuß erreicht – ein neuer Rekord für solarbetriebene Flugzeuge. Später erleidet es aufgrund einer Unvorsichtigkeit im Hangar einen schweren Schaden.
Im Jahr 1996 beginnt am Georgia Institute
of Technology die
Entwicklung des MAV-Modells Entomopter
(Insektenflügler) für den Einsatz auf dem. Die Finanzierung
übernehmen die Defense Advanced Research Projects Agency (DARPA), das
Air Force Research Laboratory (AFRL) und das NASA Institute for Advanced
Concepts. An der Entwicklung beteiligt sind außerdem die University
of Cambridge (England) sowie das ETS Labs.
Angetrieben werden die Schlagflügel des Entomopter durch ein Paar reziprok bewegten chemischen Muskeln (Reciprocating Chemical Muscle RCM). Durch diese direkte und leicht nachladbare chemische Energiequelle können auch kleine Mengen von Elektrizität für die Onboard-Systeme geliefert werden. Das entsprechende US-Patent Nr. 6.082.671 datiert vom Juli 2000.

2001 erhält der Projektleiter Robert C. Michelson für seinen 50 g schweren Doppel-Klappflügler mit 15 cm Spannweite den internationalen Pirelli Award for the diffusion of scientific culture sowie den erstmals vergebenen Top Pirelli Prize, der immerhin mit 25.000 € dotiert ist.
Aus seinen Unterlagen geht hervor, daß er sich insbesondere deshalb für eine, von der Natur abgeschaute, Klappflügeltechnik entschieden hat, da deren Wirbelbildungen sowie der beobachtete Coanda-Effekt bislang noch nicht komplett verstanden sind – und möglicherweise noch mit einigen Überraschungen aufwarten können.
Die NASA konzipiert 1997 gemeinsam mit der University
of California zudem das Konzept eines ‚Schwarmes’ aus
Solarflugzeugen, die in 20 km Höhe in V-Formation zur Übermittlung
von Mobilfunksignalen unterwegs sind. Im Sommer wird ein 50 kg wiegender
Prototyp mit einer Spannweite von 13 m getestet, dessen Tragfläche
zu 90 % mit Solarzellen bestückt
ist.
Im April 1997 wird die Pathfinder der
U.S. Navy’s Pacific Missile Range Facility (PMRF) in Kauai auf
Hawaii übergeben, da dort die klimatischen Verhältnisse
als optimal betrachtet werden. Am 07.07.1997 wird
mit einer Höhe von 71.530 Fuß einer neuer Rekord für
Solar- als auch für Propellerflugzeuge aufgestellt.
1998 werden die Flügel des Pathfinder von 29,5 m auf 36,3 m verlängert, außerdem werden verbesserte Motoren (insgesamt 8) sowie neue Solarzellen von SunPower installiert, die einen Wirkungsgrad von 19 % haben (zuvor 14 %). Das Flugzeug wird in Pathfinder Plus umbenannt, erreicht eine Leistung von 12,5 kW und stellt im August mit einer Höhe von 80.201 Fuß einen weiteren Rekord auf.
Der Pathfinder plus des Dryden Flight Research Center der NASA ist nun ein unbemannter achtmotoriger Nurflügler, der Höhen bis zu 25.000 m erreicht, da die langsam laufenden großen Propeller für extreme Flughöhen optimiert sind. In zwei Gondeln ist Platz für Spezialkameras, Messinstrumente usw., da als Einsatzgebiete Umweltüberwachung, Höhenforschung und Relaisfunk (als preiswerte Alternative zu Satelliten) infrage kommen.
Der Flieger ist 3,60 m lang, hat eine Spannweite von 36,30 m bei einer Flügeltiefe von 2,40 m. Seine Startmasse beträgt 315 kg, die maximale Zuladung 67,5 kg. Die 12,5 kW Solarleistung speisen acht 1,5 kW Motoren und erlauben eine Fluggeschwindigkeit bis zu 32 km/h. Im Sommer 2002 wird das Flugzeug bei zahlreichen Demonstrationsflügen eingesetzt, bei dem die unterschiedlichsten Fernerkundungs- und Messgeräte zum Einsatz kommen.

Eine Weiterentwicklung ist der Nurflügler Centurion, der mit seinen 61,80 m Spannweite, 3,60 m Höhe, 14 Stück 1,5 kW Motoren und 31 kW Solarzellenleistung den Zwischenschritt zum Bau des Großflugzeugs Helios bildet, das sogar sechs Monate lang ununterbrochen in der Luft bleiben kann.
Der Centurion fliegt am 10.11.1998 zum ersten mal, erreicht eine Geschwindigkeit von bis zu 33 km/h, und bei einem späteren Flug befördert er eine Test-Nutzlast von über 270 kg – mehr als halb so viel, wie er selber wiegt (529 kg). Im Laufe der 31-minütigen Flugzeit erreicht der Solarflieger eine Höhe von 120 m.
Der Centurion wird nach diversen Umbauten dann direkt in Helios umbenannt.
Der Jungfernflug des Helios ist am 08.09.1999, anschließend beginnt Dryden mit Flugtests in niedrigen Höhen. Zwischen März und September 2000 werden auf dem auf 75,3 m Länge gewachsenen Flügel mehr als 62.000 Solarzellen aufgebracht, die in 1.770 Paneelen zusammengefaßt sind. Die Hochleistungssolarzellen mit einem Wirkungsgrad von 22 % stammen zum größten Teil von der amerikanischen Firma SunPower und kosten knapp 9 Mio. $. Die Ingeniere hoffen, damit die NASA-Vorgabe von 100.000 Fuß erreichen zu können, wo die Luftdichte der Dichte der Marsatmosphäre entspricht. Der flexible Flügel besteht aus Kohlefasern und Kevlar. Bis zu 14 Motoren mit jeweils 2 PS treiben das Flugzeug an.

Auf Anweisung der NASA beginnt AeroVironment schon 1998 zudem mit der Entwicklung eines PEM-Brennstoffzellen-Systems für den Helios, das dem Solarflugzeug eine ununterbrochene Flugdauer von sechs Monaten erlaubt. Zwischen 2001 und 2003 werden zwei Brennstoffzellen-Typen entwickelt – ein regenerativer und ein nicht-regenerativer.
Beim regenerativen Typ findet die Wasserspaltung an Bord statt und erfolgt tagsüber mittels Katalysator und Solarstrom, wobei die entstehenden Gase Wasserstoff und Sauerstoff ins speziell entwickelten, besonders leichten Drucktanks gespeichert werden. Nachts versorgen die Gase die Brennstoffzelle, um den notwendigen Betriebs- und Versorgungsstrom zu gewährleisten. Damit gibt es im Prinzip keine zeitliche Beschränkung für die Flugdauer.

und Pathfinder-Plus
Beim nicht-regenerativen Typ mit permeabler Protonenaustausch-Membran kommt der Wasserstoff aus Tanks, während der Sauerstoff der Atmosphäre entzogen wird. Eine spätere Version funktioniert mit verflüssigtem Wasserstoff und erlaubt Nachtflugzeiten über zwei Wochen.
Helios (o. Centurion), der Nurflügler mit 14 Elektromotoren und einer Spannweite von über 78 m, stellt im August 2001 einen Höhenrekord für propellergetriebene Flugzeuge auf, als er im Laufe eines 17-stündigen Fluges eine Höhe von 29.413 m erreicht und damit nicht nur den bisherigen Rekord des o.g. Pathfinder-Plus bricht, sondern auch rund zwei Meilen höher kommt als bislang jedes nicht-raketengetriebene Flugzeug.
Im Juni 2003 stürzt Helios etwa 16 km der Hawaii-Insel Kauai in den Pazifik. Als Absturzursache wird ein Problem mit der Steuerung des Flugzeugs angegeben. Die divergente Phygoide Schwingung (eine Bahnschwingung der Längsbewegung) können auch durch eingeleitete Notverfahren nicht mehr rechtzeitig gestoppt werden, und starke Geschwindigkeitsüberschreitungen führen schließlich zum Versagen der Struktur und damit zum Absturz.

Zum Nachfolger der Solair I wird die ab 1996 an
der Hochschule für Bildende Künste in Hamburg gänzlich
neu entwickelte Solair
II, die trotz ihrer Spannweite von 20 m von nur
einer Person und sogar ohne Werkzeug zusammengesetzt werden kann,
da alle Strom- und Steuerungsanschlüsse in den Steckmechanismus
integriert sind und nicht vergessen werden können.
Den Erstflug mit Eigenstart absolviert die Solair II im Mai 1998 auf dem Flugplatz Telgte bei Münster. Im Sommer 1998 gibt es eine Testphase in St. Johann/Tirol. Die ursprünglichen Motoren erbringen zwar die nötige Leistung um in die Luft zu kommen, sie erhitzen sich jedoch zu schnell. Auch mit der Kühlung der Batterien gibt es Schwierigkeiten.
Von der Firma Wittenstein Motion Control wird deshalb in Zusammenarbeit mit der Universität Paderborn ein neues Antriebskonzept entwickelt. Die Solair II wird nun mit zwei kollektorlosen Drehstrommotoren ausgestattet, und auch die Batterien der Firma SANYO sind neu. Der Einbau der neuen Motoren sowie Batterien findet bei der Firma Schwille Elektronik statt.

in der Solair II
Am 28. September 1998 stirbt der ebenso geniale wie charismatische Günther Rochelt mit nur 59 Jahren völlig unerwartet – gerade zu der Zeit, als wir bezüglich meines Patents Geschlitztes Rotorblatt, das ihn ungemein faszinierte, in persönlichen Kontakt gekommen waren.
Rochelts Flugzeug ist mit einem solar aufladbaren 9,6 kWh NiCd-Speicherakku ausgerüstet, der 35 kg wiegt, seine Startmasse beträgt 230 kg, und es besitzt zwei mit geringer Drehzahl gegensinnig laufende, elektrisch verstellbare Schubpropeller an den Spitzen des V-Leitwerks, die sich im Segelflug zusammenklappen. Damit kommt der Flieger in 6 Minuten auf 600 m über Grund und erreicht auch schnell seine zugelassene Höchstgeschwindigkeit von 120 km/h.
Der Aufbau der Solair II ähnelt dem eines konventionellen Segelflugzeuges, auffällig ist allerdings die besondere Formgebung der Tragflügel mit leichter Vorpfeilung des Innenflügels und einer Rückpfeilung des Außenflügels. Dadurch werden die Sichtverhältnisse für den Piloten entscheidend verbessert. Um eine gleichmäßige Belegung des Tragflügels mit Solarzellen zu ermöglichen, haben Innen- und Außenflügel einen rechteckigen Grundriß. Lediglich ein angestecktes Randbogenstück mit angeformtem Winglet bildet den Tragflügelabschluß.

im Flug
Die 30,44 m2 Solarzellen mit einem Wirkungsgrad von 17,3 % werden mit einem neuen Verfahren verbunden, das die erforderliche Laminatdicke halbiert, außerdem erreicht die komplett neu entwickelte Antriebs- und Laderegelung mit 98 % einen extrem hohen Wirkungsgrad, so daß auch kaum etwas von der eingefangenen Sonnenenergie verloren geht. Für den Horizontalflug reichen die Solarzellen mit 1,6 kW Leistung völlig aus.
Die Solair II von Rochelt, die im Flug wie ein
mysteriöser, bislang unbekannter Vogel aussieht, verunglückt
später
bei einem Testflug in Eggenfelden. Herr Werner Schwille, Chef der Firma
Schwille Elektronik in Kirchheim, schickt mir im November 2007 folgende
Zusammenfassung der Geschehnisse:
"Nach dem Tod von Prof. Günter Rochelt stand das Flugzeug in Hamburg an der Hochschule der Bildenden Künste. Diese Universität ist auch der eigentliche Eigentümer, da das Flugzeug im Rahmen von Studienarbeiten auf dem Campus erstellt worden ist. Nach dem Tod von Günter wurde die Solair II als Dauerleihgabe an den Sohn Holger Rochelt übertragen, der die Solair II dann nach Kirchheim bei München schleppte. Hier wurde in meiner Firma die Bordelektronik erneuert und neue Motoren mit neuen Rotorblättern eingebaut. Ebenfalls wurde der Startakku (9,6 KW für 6 Minuten) erneuert. Der neue Antrieb wurde dann von einem Zulassungsbeamten abgenommen.
Als das Flugzeug startbereit war, erfolgten mehrere erfolgreiche Testflüge bis zu jenem Tag, als es in Eggenfelden auf Grund von Rauch in der Kanzel nicht mehr richtig landen konnte und die Landebahn verfehlte. Mit dieser Notlandung und dem Rauch ist die Fluglizenz sofort erloschen. Da der Rumpf gestaucht ist, ist eine Wiederzulassung äußerst schwierig.
Die Solair I hängt bereits in der Luftfahrtschau im Deutschen Museum in München, für die Solair II hat das Museum derzeit keinen Platz. Bis dahin wird das Flugzeug von uns ausstellungsreif gemacht und vorerst hier in der Firma im Seminarraum ausgestellt.Rochelts Sohn Holger, der bei mir jahrelang beschäftigt war, wollte die Ideen seines Vaters aber nicht weiterzuführen. Sonst hätten wir noch einige spektakuläre Flugobjekte in die Öffentlichkeit gebracht."
Das Deutsche Museum in München hatte 2006 Interesse
bekundet, die Solair II selbst zu reparieren
und ausstellungsreif aufzunehmen. Ich schlage Herrn Schwille daher
vor, doch dem Berliner Museum für Verkehr und Technik ein Angebot
zu machen. Schwille selbst, ein Experte für Hochfrequenztechnik,
beschäftigt sich inzwischen zunehmend mit neuen Formen der Energie
wie z.B. mit Nachbauten der Entwicklungen von Nikola
Tesla, über
den ich - neben anderen - auch in der Datenbank
der neuen Energie berichte.
Bereits m Jahr 1996 beteiligt sich die Fakultät
Luft- und Raumfahrttechnik der Universität Stuttgart mit dem Projekt Icaré am
weltweit ausgeschriebenen Berblinger Preis der Stadt Ulm. Das Ziel
ist es, ein praxistaugliches, solarelektrisch getriebenes Hochleistungssegelflugzeug
zu entwickeln, das schon bei der Hälfte der maximalen Sonneneinstrahlung
rein solar fliegen kann und in der Lage ist, den horizontalen Schwebeflug
ausschließlich mit Hilfe von Solarenergie auszuführen, in
dem es auf geringstes Sinken ausgelegt ist und auf die leichteste Thermik
anspricht. Unter der Projektleitung von Prof. Rudolf
Voit-Nitschmann wird das Forschungsprojekt mit Hilfe von Sponsorenmitteln und Mitteln
des Landes Baden-Württemberg realisiert. Im Rahmen der Entwicklung
entstehen auch etwa 45 Studien- und Diplomarbeiten.

Mit der Icaré II ist ein kombiniertes Motor/Thermik-Fliegen möglich. Der 12 kW Elektromotor ist am Seitenleitwerk angebracht, was den Wirkungsgrad erhöht. Für den Eigenstart wird Akku mit einer Leistung von 915 Wh verwendet, welcher im Flug durch 20,7 m2 Solarzellen (82 % der Flügelfläche) aufgeladen wird. Die Spannweite beträgt 25 m, das Leergewicht 264 kg und die max. Zuladung 80 kg. Das Flugzeug benötigt auf Gras eine Startstrecke von 180 m, die Höchstgeschwindigkeit beträgt 120 km/h, und ohne Sonne reicht der Akku für eine Flugzeit von 40 min.
Am 07.07.1996 gewinnt Icaré II den mit 100.000 DM dotierten Preis für das weltweit leistungsfähigste Solarflugzeug, und ein Jahr später werden sogar drei Preise eingeheimst: der EAA – Special Achievement Award (Oshkosh, USA), die Goldene Daidalos-Medaille des deutschen Aero-Club, und der OSTIV Preis (St. Aubin, Frankreich). Später werden Li-Polymer-Akkus integriert, die es dem Flugzeug erlauben, aus dem Eigenstart direkt auf 1.200 m zu steigen (davor nur 400 m).
Im November 1996 testet eine Arbeitsgemeinschaft
der University of California in L.A., der NASA und des Luft- Und Raumfahrtunternehmens
Rockwell in der Mojave-Wüste ein batteriebetriebenes UAV (Unmanned
Air Vehicle), das bei Erfolg auf Solarbetrieb umgerüstet
werden soll. In Formationsflug sollen die UAVs dann tagelang ununterbrochen
in der Luft bleiben können, da sie hierbei den Auftrieb der vorausfliegenden
Flugzeuge nutzen, ähnlich wie es bei Enten- oder Gänseschwärmen
der Fall ist.
Weiter mit den Elektro- und Solarfluggeräten...