Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Wellenenergie (XXIII)
Wellenbetriebene Schiffe und Boote
Die Idee, Wellen zum Antrieb von Booten zu nutzen, ist nicht neu – ihre Umsetzung jedoch relativ schwierig. Im Prinzip geht es darum, die verschiedenen Schwingungsformen der Wellen in eine kinetische horizontale Bewegung umzuwandeln. Eine entsprechende, allerdings bislang unbestätigte Technologie sei bereits 1850 in England erfunden, aber danach nicht weiterverfolgt worden.
Vermutlich handelt es sich um die patentierte Idee von Daniel Vrooman, der 1858 vorschlug, mit einer Reihe von Schlagflossen die Wellenenergie für den Antrieb zu nutzen (US-Nr. 22.097).
Nachweisen läßt sich weiterhin eine Erfindung aus dem Jahr 1868,
als die New York Times am 10. Mai über einem Mechaniker namens Robertson aus San
Francisco berichtet, der für den damals recht hohen Betrag
von rund 8.000 $ ein Boot entwickelt und baut, das alleine von der
Kraft der Wellen angetrieben wird. Für die Jungfernfahrt seines Bootes
entscheidet er sich gegen eine einfache Fahrt in der Bucht und wagt
sich statt dessen gleich mit drei anderen Passagieren und Nahrungsmitteln
für zehn Tage auf den Ozean.
Kaum hat das Boot den Kai verlassen, schwingt es jedoch mit der Breitseite in die Strömung und beginnt in einer höchst unangenehmen Weise zu wippen und zu schlingern. Dem Ruder gehorcht es überhaupt nicht mehr. Das Boot schwimmt einige Zeit mit dem Strom, allerdings seitlich statt der Länge nach, doch obwohl sich die Räder drehen, scheinen sie dem Boot keine zusätzliche Geschwindigkeit zu geben.
Der Erfinder besteht darauf, daß alles, was sein Boot zur Fortbewegung benötigt, eine stetige Wellenbewegung sei, doch als es knapp außerhalb der Landzungen von Golden Gate raues Wasser erreicht, werden die Probleme so groß, daß er mit seinen Gästen in ein kleines Ruderboot umsteigen muß. Ein in der Nähe befindliches Lotsenboot rettet die Gruppe.
Die ca. 500 $, um das Wrack zurück nach San Francisco zu schleppen, erscheinen dem enttäuschten Erfinder jedoch zu hoch – der es daraufhin einfach im Meer wegdriften läßt. Kein Wunder also, daß die Zeitung ihren Bericht mit der Aussage betitelte: „The San Francisco Self-Propelling Boat – Disastrous End of a Grand Experiment“.

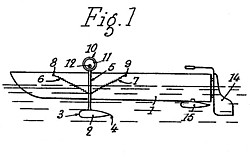
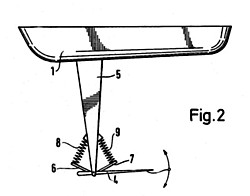
Im Jahr 1895 baut Hermann F. L. Linden aus Neapel ein Boot namens Autonaut, das die Energie von Wellen verwendet, um sich anzutreiben. Er hatte beobachtet, daß ein vorbeilaufender Wellenzug ein Boot periodisch anhebt und absenkt, und kommt dadurch auf die Idee, diese Bewegung zur Fortbewegung zu nutzen.
1898 läßt er sich ein Boot patentieren, bei dem vorne und achtern unter der Wasserlinie federnde Stahlblechflossen angebracht sind, die einen Teil der kinetischen Energie der Orbitalbewegung des Wassers in Vortrieb umwandeln.
Die erste Autonaut soll knapp 4 m lang gewesen sein und erreichte gegen Wind und Seegang bis zu etwa 3 Knoten; ein späteres, größeres Boot mit 7,32 m Länge kam auf etwa 4 Knoten. Technikhistorisch sind es die ersten bekannten Boote, die die Energie des Seegangs systematisch für den Antrieb nutzten.
(Grafik)
In der UdSSR beschäftigt sich 1936 ein G.
E. Pavlenko mit der Technologie (,Wave energy as a means of
ship propulsion’); aus dem britischen Patent Nr. 541.775 stammt eine
der hier gezeigten Abbildungen; weitere Patente stammen aus Großbritannien (Nr.
588.953) sowie aus Japan (Nr. 5.6039.995, auch hieraus gibt es eine
Abbildung).
(Grafik)
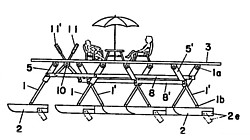
Ebenso sind aus den USA mehrere Patente zu erwähnen (Nr. 3.845.733 von 1974, Nr. 4.129.089 von 1978, Nr. 4.332.571 von 1982 - aus dem die dritte Abbildung stammt -, oder Nr. 4.481.002 von 1984).
In keinem dieser Fälle ist jedoch etwas von einer Umsetzung zu finden.
(Grafik)
In dem US-Magazin Popular Science wird 1935 kurz
ein Erfinder aus Long Beach, Kalifornien, vorgestellt, dessen Name
aber nicht genannt wird. Dieser habe einen wellenbetriebenen Mechanismus
für den Antrieb eines Bootes entwickelt, der aus zwei Flossen im Bug
und einer Flosse im Heck besteht, die an flexiblen Gelenken befestigt
sind.

mit Modellboot
Dem Bericht zufolge konnte ein vom Erfinder gebautes, etwa 44 cm langes Modell eine Geschwindigkeit von 8 km/h erreichen, da die Flossen im Vergleich zur Wasserfläche des Rumpfes relativ groß waren.
Richtige Tests beginnen 1978 in Trondheim, Norwegen, mit einem wellennutzenden Modell des Erfinders und Ingenieurs Ejnara Jakobson, aus denen 1980 Versuche mit einem 1 m langen Boot resultieren, das eine Geschwindigkeit von 1,78 Knoten erreicht.
Später folgen Untersuchungen an einem 7,5 m langen Boot, das mit zwei bzw. vier Flügeln ausgestattet wird, die jeweils eine Fläche von 0,5 m2 haben. Damit werden sogar schon 6 Knoten erreicht. Ein Bericht darüber befindet sich in dem (von mir noch nicht eingesehenen) Magazin Motor Ship, Nr. 64, August 1983.
Das Unternehmen Wave Control Co. hält die Patente an dem System und führt die Versuche durch. Von der norwegischen Regierung erhält es 1983 eine Förderung in Höhe von 450.000 Kronen, um die Technologie weiterzuentwickeln. Den Quellen zufolge ist auch das Institute of Fishery Technology Research in Trondheim an den Untersuchungen beteiligt.

1984 werden erfolgreiche Versuche mit einem 20,4 m langen und 180 t schweren Trawler namens Kystfangst durchgeführt, der mit einer aus- und einklappbaren Anlage mit Tragflächen zur Umsetzung der Wellenenergie in Vortrieb ausgestattet ist. Die Struktur besteht aus zwei Flügeln, die drei Meter vor dem Bug befestigt werden, wobei zwei Varianten zum Einsatz kommen: eine mit 3 m2 großen, die andere mit 5 m2 großen Flügeln.
Man kann sie auf dem leider nicht sehr scharfen Foto in hochgehobenem Zustand sehen. Um die notwendige Anstellwinkel zu halten werden pneumatische Servomechanismen verwendet. Die Ergebnisse sind ermutigend, werden jedoch trotzdem nicht weiter verfolgt.
Auch in Japan werden 1981 - 1984 intensive theoretische
und experimentelle Forschungen an oszillatorischen Triebwerken durchgeführt,
die zu dem Entwurf eines großen Schiffes führen, das für seine Bewegung
die Wellenenergie nutzt. Besonders aktiv sind das Institute
of Technical Research und die Firma Hitachi Tzozen
Corp. in Osaka.
Im Laufe des Jahres 1984 werden Pläne für zwei Schiffe von 27 m bzw. 300 m Länge entwickelt, die beide mit Triebwerks-Flügeln ausgestattet sind. Das größere Schiff soll ausschließlich mit der Wellenkraftanlage auf bis zu 11 Knoten beschleunigt werden können. Doch auch diese Projekte scheinen später eingestellt worden zu sein, denn ich habe keinerlei aktuelleren Informationen darüber finden können.

(Grafik)
Einen weiteren wellenbetriebenen Schiffsantrieb schlägt Francois
Kneider aus dem französischen Velaux vor. Er beginnt spätestens 1990 mit
seiner Arbeit, da er in diesem Jahr ein Patent darauf beantragt, doch
bislang ist das Projekt noch immer nicht über das
Stadium von Grafiken und einem kleinen Modell hinausgekommen.
1996 veröffentlicht V. V. Arabadzhi, Forscher
am Institute of Applied Physics der Russischen Akademie
der Wissenschaften in Nizhny Novgorod einen Artikel ,Calculation of
the thrust of a wave-powered marine propelling device’ – und unter
dem Titel ,The Self-Propelled Model of a Boat, Based on the Wave Thrust’
folgt 2009 ein weiterer Bericht über die Entwicklung,
von der inzwischen auch Versuche mit einem kleinen Modell im Wellentank
durchgeführt worden sind. Ich würde mich freuen, falls jemand nähere
Details darüber hat.
Auch am Department of Mechanical Engineering der Universität Glasgow wird
an einem Wellenantrieb für Boote gearbeitet. R. C. McGregor und G.
R. Thomson veröffentlichen 1997 einen Bericht
mit den Titel: ‚Sea trials of wave propulsion of a yacht using a flexible
fin propeller’.
Die Schlußfolgerung der Wissenschaftler lautet, daß eine flexible Flosse (oszillierende Tragfläche) energieeffizienter sein kann als ein herkömmlicher Schraubenpropeller. Nun wird unter den kontrollierten Bedingungen eines Labors untersucht, ob die flexible Flosse Wellenenergie in ein effektives Hilfsmittel für den Vortrieb umwandeln kann. Auch hier werden die Ergebnisse als positiv bewertet ... ohne daß es Spuren dafür gibt, daß die Arbeit später fortgesetzt wurde.
2005 erhält ein G. G. Cambon aus Italien das
internationale Patent (Nr. 2005/058689) für ein Boot, das sich mittels
welleninduzierter kinetischer Energie fortbewegt.
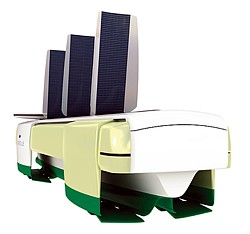
Die Firma Wallenius Wilhelmsen Logistics wird von Toyota beauftragt,
für die Expo 2005 in Japan ein Null-Emissions-Schiff
zu entwerfen. Dabei entsteht das Projekt der E/S Orcelle,
über die ich schon in den Kapiteln Segelschiffe und Elektro-
und Solarboote geschrieben habe, da das Konzept auch die beiden
Erneuerbaren Energien Wind und Sonne nutzt (s.d.) - neben Wasserstoff-Brennstoffzellen,
die etwa 50 % des Energiebedarfs decken und als Energiezwischespeicher
dienen sollen.
(Modell)
Die Orcelle soll das erste moderne Transportschiff werden, dessen elektrischer Antrieb vollständig von erneuerbaren Energien versorgt wird. Sie soll etwa 250 m lang werden und eine Tragfähigkeit von 20.000 t besitzen. Das Schiff, das 10.000 Autos transportieren soll, wird mit drei großen Starrsegeln aus einem leichten Verbundwerkstoff ausgestattet, die gleichzeitig mit Solarzellen belegt sind. Auch die Schiffshülle besteht aus einem extrem leichten Aluminium-Thermoplast-Werkstoff.
Außerdem – und deshalb wird das Projekt hier aufgeführt – soll das Schiff mit einer Anlage ausgestattet werden, welche die Wellenenergie nutzt. Zwischen den seitlichen Rümpfen und dem Hauptrumpf sind je drei Flossen vorgesehen, die dazu beitragen das Schiff bei rauher See zu stabilisieren. Sie liegen flach im Wasser und sehen aus wie vergrößerte Lamellen einer Jalousie.
Gleichzeitig helfen die insgesamt 12 Flossen auch bei der Energieversorgung: Werden sie durch die Wellen auf und ab bewegt, dann übertragen sie diese mechanische Energie an Generatoren, die daraus Strom erzeugen. Umgedreht lassen sie sich mittels der Zufuhr an elektrischer oder mechanischer Energie selbst bewegen und für den Vortrieb nutzen. Bislang gibt es allerdings nur ein etwa 150 cm langes Anschauungsmodell des Schiffes.
Ebenfalls 2005 beginnt Jörg Sommer mit
der Entwicklung seines Öko-Trimarans, der neben zwei
großen, gegenläufigen Twister-Senkrechtachsern (eine Weiterentwicklung
des Darrieus-Rotors)
und einem weit gespannten Solarzellendach auch die Wellenenergie nutzen
soll, und zwar mittels drei flexibel aufgehängter Schwimmer, die mit
ihren hydraulischen Systemen sowohl während der Fahrt als auch bei
Stillstand zur Stromgewinnung für das bordeigene Speichersystem beitragen.

(Grafik)
Sommer kombiniert die Nutzung der verschiedenen Energieressourcen mit einem ansprechenden Design, das technisch durchdacht im Laufe der Folgejahre in mehreren Stufen weiterentwickelt wird. 2010 findet man auf seiner Homepage ausführliche Beschreibungen, Grafiken und Animationen. Auch hier ist von einer Umsetzung, die wirklich wünschenswert wäre, noch nichts zu hören.
2006 bietet das Technology Transfer Office der University
of California, San Diego, unter der Referenznummer Tech ID
21070 eine Erfindung an, mit der die Wellenbewegungen des Meers in
Vortrieb umzuwandeln sind. Sie ist für leichte Boote, wissenschaftliche
Beobachtungsgeräte oder Rettungsinseln geeignet.
Das System besteht aus einem leichten Segel, welches den Unterschied der Wellenbewegung an der Meeresoberfläche und etwas weiter in der Tiefe ausnutzt, um eine Vortriebskraft zu entwickeln, die eine schwimmende Plattform oder ein Schiff selbständig vorantreiben kann. Mittels einer GPS-fähigen Lenkung könnte ein autonomes Fahrzeug die Welt umrunden, ohne jemals einen Tropfen Kraftstoff zu benötigen.
Anfang 2007 wird in Sunnyvale, Kalifornien, die Firma Liquid
Robotics gegründet, ein Joint-Venture zwischen Roger
Hine und der Jupiter Research Foundation in
Los Altos und Puako, einer 2003 gegründeten non-profit
Forschungsgemeinschaft. Ziel der Zusammenarbeit ist es, eine nicht
verankerte Datenboje weiterzuentwickeln, mit welcher ursprünglich Buckelwale
beobachtet worden sind.

(Grafik)
Das Produkt der Bemühungen ist der patentierte Wave Glider, eine von Wellenergie angetriebene autonome Datenboje, die als Unmanned Maritime Vehicle (UMV) Dutzende von zuvor nicht möglichen Anwendungen und Aufgaben ermöglicht. An der Technologie wird bereits seit 2005 gearbeitet, und schon frühe Exemplare des selbständigen Wasser-Vehikels legen Strecken von über 10.000 Meilen zurück.
Mit dem neuen Unternehmen soll nun die Kommerzialisierungsphase eingeläutet werden. Für Tests und Untersuchungen wird eine Basis bei Kawaihae auf Hawaii geschaffen, und schon 2008 können die ersten Objekte an Kunden ausgeliefert werden.
Durch das kontinuierliche Ernten von Energie aus der Umwelt ist ein Wave Glider in der Lage, lange Strecken zurückzulegen, feste Positionen zu halten und/oder weite Gebiete zu überwachen, ohne dabei jemals auftanken zu müssen.
Die ausgetüftelte zweiteilige Architektur mit ihrem speziellen Flügelsystem, das unter dem gut 2 m langen Glider im Wasser schwimmt und über ein 7 m langes Kabel mit der Surfboard-artigen Plattform an der Oberfläche verbunden ist, wandelt die Wellenbewegung direkt in Schub um - während die beiden 43 W Solarpaneele den Strom für Sensoren und andere Nutzlasten liefern. Dadurch kann der Wave Glider selbständig in weit entfernte Gegenden reisen, Daten sammeln und muß nur für Wartungsarbeiten zurückkehren, ohne daß hierfür jemals ein Schiff seinen Hafen verlassen müßte. Es werden bereits Fahrten über mehr als 5.000 km innerhalb von 5 Monaten dokumentiert.

Der autonome Schwimmer besitzt eine konfigurierbare Plattform, die eine Vielzahl von Sensor-Nutzlasten erlaubt. Die Daten werden über Satellit an Land übertragen, und die ständige Präsenz an der Oberfläche bedeutet, daß diese Daten auch gesendet werden können, sobald sie gesammelt sind. Die Traglast kann von den Kunden installiert oder von Liquid Robotics integriert werden.
Im Januar 2009 umkreist ein Wave Glider namens Red Flash die Insel Hawaii in nur neun Tagen und erreicht dabei eine Durchschnittsgeschwindigkeit von 1,57 Knoten, während die beiden Glider Honu und Kohala Mitte des Jahres die über 2.500 Meilen lange Strecke von Hawaii bis ins kalifornische San Diego innerhalb von 82 Tagen zurücklegen – ebenfalls ausschließlich von Wellenkraft angetrieben. Andere Modelle legen sogar Strecken von über 10.000 Meilen zurück.
Die Jupiter Research Foundation plant nun, im August 2012 gleich fünf Wave Glider im spanischen Sevilla starten zu lassen – anläßlich des Jahrestages der berühmten Fahrt von Magellan im Jahr 1519, die dieser ebenfalls mit fünf Schiffen begann. Es ist geplant, sich bei der Umfahrung der Erde möglichst eng an die damalige Route zu halten. Leider läßt sich nichts darüber finden, ob dieses Projekt umgesetzt worden ist.
Im August 2010 wird bekannt, daß BP Wave Glider einsetzen wird, um die langfristigen Auswirkungen der Ölkatastrophe im Golf von Mexiko zu messen.

des Wave Glider
Im Juni 2011 gibt Liquid Robotics bekannt, daß man in einer Finanzierungsrunde D 22 Mio. $ Investitionsmittel von dem Silicon Valley Venture-Unternehmen VantagePoint Capital Partners sowie dem Öl- und Gas-Anbieter Schlumberger bekommen habe. Das Unternehmen kann zu diesem Zeitpunkt schon eine ganze Reihe erstklassiger Kundenreferenzen vorweisen: die National Ocean and Atmospheric Administration (NOAA), die Woods Hole Oceanographic Institution, das Monterey Bay Aquarium Research Institute, die Scripps Institution of Oceanography und die University of Hawaii. Was dem Preis eines Wave Gliders zwischen 100.000 $ und 500.000 $ wohl angemessen ist.
Im gleichen Monat erfährt man, daß das Unternehmen eine Nachricht von einem der Roboter erhalten hatte, daß etwas nicht in Ordnung sei. Der Pilot wies den Roboter daraufhin an, in den Hafen zurückzukehren, und bei der Inspektion wurden verräterische Zahnmarkierungen von einem großen Hai festgestellt. Es ist allerdings eine Ausnahme, denn die 60 Roboter die sich bereits im Einsatz befinden, haben bislang zusammengerechnet über 150.000 Meilen auf See zurückgelegt, ohne mit Haien in Konflikt geraten zu sein. Und während einer Reise nach Alaska überlebt einer der Roboter mehr als 6,5 m hohe Wellen.
Eine kleine Roboterflotte aus vier Wave Glidern startet im November 2011 in der Bucht von San Francisco, um vollkommen selbtändig den größten Ozean unseres Planeten, den Pazifik, zu durchkreuzen. Steuerelemente sorgen dafür, daß die mit GPS ausgestatteten Geräte den Kurs einhalten. Im Rahmen des Projekts PacX Challenge (= Pacific Crossing) wird die Gruppe geschlossen von San Francisco nach Hawaii, und dann jeweils zu zweit weiter nach Japan und Australien segeln. Insgesamt sollen sie so 60.000 km im offenen Ozean zurücklegen, während sie kontinuierlich Daten über den Salzgehalt, den Sauerstoffgehalt und die Temperatur des Wassers, die Wellenbewegungen und das Wetter sammeln und senden, die dann im Google Earth Ocean Showcase veröffentlicht werden.
Im März 2012 erreicht die Flottille nach 5.926 km ihr erstes Ziel, Hawaiis Big Island, und setzt damit auch einen neuen Streckenrekord für unbemannte wellenbetriebene Fahrzeuge, der zuvor bei 4.630 km lag. Nach einer Überprüfung setzen Roboter im Mai ihre Reise paarweise fort, um ihre weiter entfernten Ziele bis Ende 2012 oder Anfang 2013 zu erreichen.

der Wave Glider
Tatsächlich kann Liquid Robotics im Dezember 2012 melden, daß der erste Glider nach 17.000 km seinen endgültigen Bestimmungsort in der Hervey Bay nahe Bundaberg im australischen Queensland erreicht hat. Es handelt sich um den Wave Glider Papa Mau, der seinen Namen zu Ehren des mikronesischen Navigators Mau Piailug trägt. Damit wird ein weiterer Weltrekord für die längste Strecke gesetzt, die ein Roboter-Fahrzeug zurückgelegt hat, der auch ins Guinness Buch der Rekorde aufgenommen wird.
Der zweite Roboter namens Benjamin erreicht sein Ziel im Februar 2013. Einer der beiden in Richtung Japan gestarteten Wave Glider, Fontaine Maru, mußte derweil zur Reparatur nach Hawaii zurückkehren und wird seine Reise erst danach fortsetzen.
Im März 2013 schließt Liquid Robotics eine Finanzierungsrunde E mit 45 Mio. $ unter Leitung der Private-Equity-Firma Riverwood Capital und mit der Teilnahme bestehender Investoren, darunter VantagePoint Capital Partners. Dem Unternehmen zufolge sollen die Mittel dazu verwendet werden, um den weltweiten Vertrieb und das Netz der Partner- und Service-Organisationen zu erweitern. Außerdem soll mit dieser Investition auch die Entwicklung neuer kostengünstiger Lösungen für die weltweite Verteidigung, für Wissenschaft und Forschung, sowie für die Öl- und Gas-Märkte finanziert werden (die Reihenfolge entspricht den Veröffentlichungen der Firma).
Schon im April kündigt die Firma mit dem neuen Modell Wave Glider SV3 eine fortgeschrittene Version an. Dabei handelt es sich um ein System mit Hybridantrieb: Der neuen Glider kann sowohl die Wellen- als auch die Solarenergie für den Vortrieb nutzen. Damit besteht nun die Möglichkeit, gesteuerte und ununterbrochene Missionen unter allen Wetterbedingungen durchzuführen. Im selben Monat ist Liquid Robotics Gewinner der Edison-Goldmedaille für Innovation bei Energieerzeugung und -anwendung.
Ein Deng Zhihong aus Kanada erhält 2008 das
internationale Patent (Nr. 2008052440) für ein Gerät, das Wellenenergie
in Vortrieb wandelt.
Auch andere neue Ansätze sind schon erfolgreich verwirklicht worden.
Besonders hervorzuheben ist das wellenbetriebene Boot von Kenichi
Horie, über das ich in der Länderübersicht Japan schon
ausführlich berichtet habe (s.d.).
(Grafik)
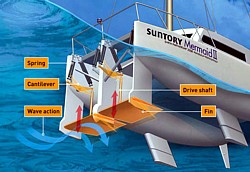
Die Suntory Mermaid II wandelt Wellenenergie in Schub um, indem sie zwei Flossen nutzt die unter dem Bug angebracht sind. Diese bewegen sich mit den Wellen auf und ab und erzeugen die ‚Kicks’, die das Boot vorwärts treiben.
Dieses ist ein 9,5 m langer, 3,5 m breiter und 3 t schwerer Katamaran aus recyceltem Aluminium, der von Yutaka Terao und den Forschern der Universität Tokai in der japanischen Hafenstadt Shimizu entwickelt worden ist.
Im März 2008 startet Horie zu einer 7.000 km langen Fahrt, für die er allerdings 111 Tage braucht (andere Quellen: 108 Tage), da das Boot im Schnitt langsamer als mit Schrittgeschwindigkeit fährt (ca. 1,5 Knoten). Maximal werden 5 Knoten erreicht.
Auch in der Ukraine wird an einem Wellen-Antrieb für Schiffe gearbeitet.
Die 2008 dort patentierte Ship Wave Engine (SWE)
transformiert die Wellenenergie in Rotationsenergie für den Propeller,
wobei u.a. eine Schwungmasse zum Einsatz kommt, die von den Wellenimpulsen
beschleunigt wird. Zuständig ist das Laboratory of New Systems
of Alternative Power in Kiew, eine praktische Umsetzung
ist bislang noch nicht erfolgt.
Im Jahr 2010 arbeitet der aus Montevideo, Uruguay,
stammende Abenteurer Gustavo Tabakian im spanischen
Cadiz an einem wellenbetriebenen Bootsantrieb, mit dem er den Atlantik
überqueren will. Hilfe bekommt er dabei von Ken Upton von
der Amateur Yacht Resarch Society (AYRS) in London.
Upton soll die erste Person gewesen sein der aufgefallen ist, daß Delphine für ihre Schwimmgeschwindigkeit eigentlich zehn Mal mehr Muskeln bräuchten als sie tatsächlich vorzuweisen haben. Er kommt zu dem Schluß, daß die Meeressäuger die Rollbewegung der Wellen zur Beschleunigung ihres Vortriebs nutzen.
Die entsprechende Umsetzung von Tabakian verwendet Flossen, um die vertikale Bewegung der Wellen in horizontalen Vortrieb umzuwandeln. Er erwartet, damit Geschwindigkeiten von 10 Knoten oder mehr zu erreichen. Aus den Zeichnungen seines Blogs ist zu entnehmen, daß sein Boot 6 m lang und 1,7 m breit ist, das Leergeweicht wird rund 200 kg betragen. Bislang gibt es allerdings noch keine Fotos von seinem Antriebssystem (Stand Oktober 2010).

Ohne jegliche weiterem Angaben erscheint im April 2010 ein
YouTube-Clip, in dem der junge Inder (?) B. R. Shreyas das
Modell eines kleinen Bootes präsentiert, das von Wellen angetrieben
werden soll. Der Mechanismus scheint dem Antriebssystem der Mermaid
zu ähneln.
Mit seinem sozialen Projekt namens Sharang will er die Antriebstechnik verbreiten und sei in einem von Dell organisierten internationalen Wettbewerb auch schon unter den Top 100 Innovationen gelandet, was ich bislang jedoch nicht verifizieren konnte.

Shark
Im August 2010 erscheinen zwei weitere YouTube-Clips,
in denen ein wellenbetriebenes Boot mit dem optimistischen Namen Shark zu
sehen ist.
In seinem in Kammern unterteilten und nach unten offenen Rumpf sind mehrere Schwimmer eingelassen, die über Freiläufe alle auf eine gemeinsame Achse zugreifen, an deren Ende sich ein Getriebe mit angeschlossener Schiffsschraube befinden.
Bei dem gezeigten Versuch gelingt es den relativ schwachen Wellen jedoch kaum, die Achse in Drehung zu versetzen.
Ich denke, daß in den kommenden Jahren noch andere Technologien auftauchen
werden, mit denen die Wellenenergie erfolgreich zum Vortrieb von
Schiffen genutzt werden kann.
Grenzen der Nutzung
Die hohen Kosten der Wellenenergienutzung entstehen
durch die notwendige Menge kleiner Anlagen in Form sehr langer Transformationsketten.
Die Energieleistung ist außerdem relativ gering und unperiodisch.
Neben ihrer Stabilität gegenüber Sturmwellen müssen
die Systeme sensibel genug sein, um auch kleine Wellen ausnutzen zu
können. Auch treten erhebliche horizontale Schwungkräfte
auf, die entweder aufgefangen (im Sinne von abgedämpft) oder ebenfalls
genutzt werden können, was die Anlagen dann aber noch weiter verkompliziert.
Zur Erzielung einer konstanten Ausgangsleistung erfordern Wellenkraftsysteme kostspielige Zwischenspeicher, negative Umwelteinflüsse werden befürchtet und allzu verlässliche Erfahrungswerte zu Wirkungsgraden liegen bislang noch nicht ausreichend vor.
Zusammengefaßt gibt es außerdem noch folgende Risiken:
-
Korrosion der Anlage, insbesondere der Turbine durch Salzwasser (ausgenommen OWC-Kraftwerke mit Luftturbinen)
-
Gefahr der Zerstörung der Anlage bei Extremwellen und Sturmfluten
-
Gefahr der Umweltverschmutzung bei austretendem Hydraulik-Öl
-
Eingriffe in die vorhandene Meeresströmung (mögliche Versandung)
-
Beeinträchtigung der Schifffahrt
-
Optische und akustische Beeinträchtigung bei Wellenkraftwerken oberhalb der Wasserlinie
Als nächstes folgen nun diverse andere Technologien zur energetischen Nutzung des Meeres, wie des Temperaturgradienten, des Salinitätsgradienten u.a.m.