Buch der Synergie
| Blättern |
 TEIL
C
TEIL
C
Elektro- und Solarschiffe (I)
1838 - 1999
Die lange Geschichte der Elektroboote und -schiffe soll
durch einige besondere Highlights illustriert werden:
Bereits 1838 experimentiert der deutsch-baltische Physiker Prof. Moritz Hermann von Jacobi in Rußland mit einem elektrisch angetrieben Schaufelradboot. Die Schiffsschraube war ihm noch nicht bekannt. Sein vier Jahre zuvor bei der St. Petersburger Akademie der Wissenschaften eingereichter Entwurf wird von Zar Nikolaus I. finanziert.
Das Jacobi-Boot wird erstmals im September 1839 auf den Kanälen von Sankt Petersburg und der Newa erprobt. Der Antrieb erfolgt über einen Gleichstrommotor, der seine Energie aus galvanischen Zellen erhält. Mit 12 – 13 Passagieren an Bord erreicht das Elektroboot eine Fahrtgeschwindigkeit von knapp 5 km/h. In den Folgejahren verbessert Jacobi den Motor sowie die Batterietechnik weiter und unternimmt weitere Fahrten.
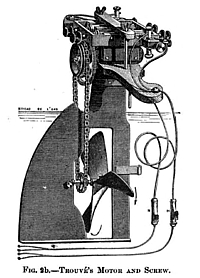
von Trouvé
Der weltweit erste elektrische Außenbordmotor wird
im Mai 1880 von dem Pariser Gustave
Trouvé patentiert
(Fr-Nr. 136560), der uns schon bei den Elektromobilen begegnet ist
und sogar ‚elektrischen Schmuck’ herstellte.
Mit einem Boot namens Le Téléphone – eine Hommage an Graham Bell, der fünf Jahre zuvor selbiges erfunden hatte – erreicht Trouvé 1881 eine Geschwindigkeit von 10,8 km/h. Anderen Quellen zufolge soll das frühe Elektroboot den Namen Eureka getragen haben. Später wurden etwa 300 dieser Motoren gebaut und hauptsächlich an Freizeit-Schiffen auf der Seine eingesetzt.
Zwischen den 1880er und den 1920er Jahren
erleben die leisen, sauberen und relativ zuverlässigen elektrischen Bootsantriebe
eine Art ,goldenes Zeitalter', da Fortschritte bei Batterien und Motoren
elektrische Boote für Freizeitfahrten populär machen, insbesondere auf
Flüssen wie der Themse.
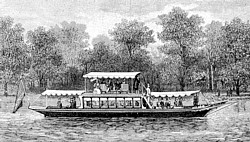
Auf der Internationalen
Elektrischen Ausstellung in Wien wird 1883 ein
Elektroboot vorgestellt, das 40 - 45 Passagiere auf der Donau zwischen
Wien und Pressburg befördert.
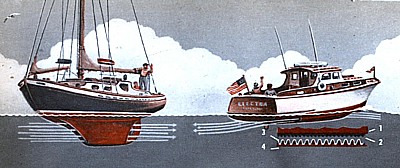
Im Jahr 1886 fährt das elektrisch angetriebenes Versuchsboot Electra auf
der Spree in Berlin Erprobungsfahrten zur Lösung des Nahverkehrsproblems
in der Stadt durch. Das Schiff der Firma Siemens & Halske hat
einen aus Stahlblech bestehenden Bootskörper, der ebenso wie der Propeller
mit einem Durchmesser von 40 cm von der erst 1884 gegründeten Schlosswerft in
Harburg geliefert wird.
Das mit 80 Akkumulatoren und einem 5,9 kW starken Motor betriebene und für 25 Passagiere zugelassene Elektroboot wird erstmals während der Berliner Gewerbeausstellung öffentlich vorgestellt, seine Höchstgeschwindigkeit beträgt 14 km/h. Auf Wikipedia wird im Zusammenhang mit der Electra ein Zeitungsbericht der Täglichen Rundschau von 1903 zitiert, in welchem die mutige Vorhersage getroffen wird, „daß die Elektrizität dereinst auch auf dem Wasser alle bisherigen Triebkräfte verdrängen wird.“
Ab 1888 verkehren diverse größere Passagier-Elektroboote
vor allem auf der Themse und anderen europäischen Gewässern. Als Beispiel
sei die von dem Elektroingenieur Moritz Immisch und William
Keppel, Viscount Bury (o. William Coutts Keppel; später 7.
Earl of Albemarle) geplante Viscountess Bury genannt, die
mit 20 m Länge für etwa 84 Passagiere ausgelegt ist und vom Bootsbaubetrieb Sargeant & Co. im
britischen Chiswick gebaut wird .
Die Viscountess Bury ist der Vorläufer einer Flotte von 23 Elektrobooten, die auf der Themse in London von der Moritz-Immisch Electric Launch Co. zur Vermietung betrieben werden. Dazu werden entlang der Themse mehrere Ladestationen für die Elektroboote errichtet: 1893 gibt es acht solcher Stationen zwischen Kew und Caversham, 1902 bereits über 20 an Land und zwei als schwimmende Ladestationen. Die Viscountess Bury fährt bis etwa 1910 elektrisch, bevor sie auf Brennstoffbetrieb umgestellt wird. Die Geschichte wird ausführlich auf den Seiten der East Anglian Waterways Association präsentiert.
Ebenfalls 1888 ordert das Chinesische Kaiserreich
15 m lange E-Boote, die 18 km/h schnell sind, um mit dieser Überlegenheit
den Opiumhändlern das Handwerk zu legen. Falls jemand Details
darüber hat, bitte ich um Zusendung dieser.
Der spanische Kapitänleutnant und Ingenieur Isaac Peral entwirft 1885 ein batteriebetriebenes U-Boot und legt die Pläne der Marine wie auch der spanischen Regentin Maria Christina von Österreich vor. Da der Entwurf überzeugt, wird im April 1887 der Bau des U-Boots Peral genehmigt, der anschließend in der Bauwerft Arsenal de la Carraca in San Fernando erfolgt. Die Baukosten belaufen sich auf gut 300.000 Peseten.

Die zigarrenförmige Peral hat eine Länge von 21 m und einen Durchmesser von 2,59 m. Sie wird durch zwei Elektromotoren mit jeweils 30 PS angetrieben, deren Akkumulatoren nur durch eine externe Stromversorgung wieder geladen werden konnten. 1889 werden bei Tests erfolgreich drei Torpedos abgeschossen, und im Juni 1890 taucht das U-Boot für 1 Stunde und 5 Minuten in einer Tiefe von 10 m und legt dabei 5,5 km zurück. Trotzdem erwiesen sich die Maschinen und die Steuerung als ungeeignet und das U-Boot liegt unstabil im Wasser. Nach 1890 wird es nicht weiter getestet und wieder ins Arsenal de la Carraca gebracht. Seit Dezember 2012 wird es im Museo Naval ausgestellt.
In Frankreich entwickelt entwickelt der Schiffskonstrukteur Henri Dupuy de Lôme zusammen mit Gustave Alexandre Zédé ebenfalls ein battriebetriebenes U-Boot namens Gymnote, das in Toulon gebaut wird, dem Heimathafen der Französischen Marine im Mittelmeer. Zwar stirbt Lôme 1885, doch die Admiralität erteilt trotzdem 1886 einen entsprechenden Bauauftrag. Die Gymnote (Zitteraal, Kennung: Q 1) ist nach der mit Druckluft betriebenen Plongeur das zweite U-Boot der Marine - und das erste, das mit einem neuartigen Elektromotor ausgestattet ist.
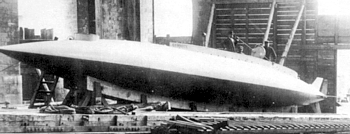
Das 17,8 m lange U-Boot mit Verstellpropeller besitzt 564 Bleiakkumulatoren zur Versorgung der elektrischen Hauptmaschine mit einer Leistung von 55 PS (41 kW). Aufgetaucht wird eine Höchstgeschwindigkeit von mehr als 7 Knoten (13 km/h) erreicht, unter Wasser lediglich etwas mehr als 4 Knoten. Die Reichweite beträgt über Wasser 120 km, getaucht bis zu 46 km.
Die Gymnote läuft im September 1888 vom Stapel und vor Toulon werden erste Versuche gemacht, doch bevor diese zu einem praxistauglichen Ergebnis führen, stirbt auch Zédé an den Folgen einer Labor-Explosion. Im Jahre 1898 wird das U-Boot grundlegend modernisiert und erhält einen leistungsfähigeren Elektromotor mit 90 PS und einen neuen Turm. Insgesamt führt das Boot über 2.000 Tauchfahrten durch, bis sie im Juni 1907 in einem Dock in Toulon sinkt. Sie wird zwar gehoben, aber im Folgejahr endgültig ausgemustert. Die Peral und die Plongeur sind somit die ersten einsatzfähigen elektrisch angetriebenen U-Boote der Welt.
Jack Wright ist der Held einer beliebten Serie von
viktorianischen Science-Fiction-Groschenromanen und -Geschichten, die
von Luis Senarens, der als der ,amerikanische Jules
Verne’ bezeichnet wird, geschrieben wurden und zwischen 1891 und 1896 in
120 Romanen erscheinen. Senarens ist sehr angetan von den neuen Anwendungen
der Elektrizität, und setzt sie recht großzügig ein - indem er damit
angetriebene Maschinen beschreibt, wie Luftschoner, Lokomotiven, Ballonschiffe,
Torpedorammen, U-Boote, Schlittenboote und sogar elektrische
Ozeandampfer - wie es sie allerdings auch 100 Jahre später
noch nicht gibt.
1892/1893 übernehmen 55 Exemplare der 11 m langen E-Boote
der Electric
Launch Co. (Elco) den Transport von mehr als einer Million
Besucher auf der Weltausstellung Chicago – und legen dabei
ohne eine einzige Panne über 200.000 Meilen zurück. Außerdem
fahren sie 300.000 $ Gewinn ein.
Ein experimentelles Schiff mit Oberleitung wird im
Jahr 1893 von
Frank W. Hawley auf dem Erie-Kanal in den USA getestet
- so merkwürdig dies auch klingen mag. Abgeleitet vom
nur wenige Jahre zuvor erfundenen Trolley-Bus wird das Gefährt Trolleyboat genannt.
Die Technik ist interessant genug, um hier etwas ausführlicher betrachtet
zu werden.

Über die gespannten Kabel und die Stromabnehmer werden zwei Elektromotoren von jeweils 25 PS versorgt, welche die beiden Schiffschrauben betreiben. Im Gegensatz zu Batterie-Booten bleibt der Laderaum weitgehend frei - und die Reichweite ist theoretisch unbegrenzt. Die Technik wird auch in Frankreich, Belgien und Deutschland für Schlepper und hauptsächlich in Kanälen eingesetzt, um die Zuggespanne auf den Treidelpfaden zu ersetzen, ist inzwischen aber fast völlig in Vergessenheit geraten. Die Sache ist so interessant, daß sie eine etwas ausführlichere Betrachtung verdient.
Die einzigen propellerbetriebene Trolleyboat-Linie, jemals kommerziell betrieben wird, wenn auch nur für einige Jahre, wird 1899 auf einem 4 km-Abschnitt des Kanal von Charleroi in Belgien eingerichtet, um mit den Trolleybooten unmotorisierte Kanalschiffe zu ziehen. Über mehrere andere Oberleitungs-Schiffe, wie z.B. das propellergetriebene Trolleyboot, mit dem 1903 in Deutschland auf dem Teltowkanal in der Nähe von Berlin experimentiert wird, berichte ich im Kapitelteil Oberleitungssysteme (s.d.).
Eine Abwandlung bildet der Kettenzug, bei dem anfänglich Dampfmaschinen eingesetzt werden, die jedoch später teilweise durch Elektromotoren in Kombination mit einem Trolleysystem ersetzt werden. Bei der erstmals vom französischen Ingenieur François Galliot in die Praxis umgesetzten Methode wird ein auf dem Grund des Kanals verlegtes Seil oder einer Kette angehoben und über Rollen oder Räder am Boot geführt, die die Kette oder das Kabel fest umklammern. Diese Rollen wurden durch einen Motor auf dem Boot in Drehung versetzt und ziehen das Boot auf dem Kabel durch die Wasserstraße.
Die Anordnung entspricht im Wesentlichen der Trolley-Propeller-Methode, aber anstatt einen Propeller zu drehen, dreht der Motor die Zugtrommeln oder Maschinen - was den wichtigen Vorteil hat, daß das System keine starken Wasserstrudel erzeugt und somit mit den flachen und empfindlichen Kanälen kompatibel ist.

Dampfbetriebene Kabelzugtransporter werden bereits Ende der 1860er Jahre betrieben, meist auf Flüssen. Zwei davon fahren von 1873 bis 1880 auf einem 125 km langen Abschnitt des Erie-Kanals, behindernden übrigen Verkehr aber so stark, daß ihr Einsatz eingestellt wird.
Das erste elektrisch betriebene Unterwasserkabelsystem, bei dem die Zugmaschine von einem Elektromotor auf dem Boot angetrieben wird, der von einem Oberleitungsstromkreis mit Strom versorgt wird, wird im Jahr 1894 im Kanal von Bourgogne in Frankreich eingerichtet und bleibt mehr als 20 Jahre lang in Betrieb. Die 6 km lange Strecke führt auch durch einen 3,3 km langen Tunnel. Eine weitere Linie wird erst im Jahr 1933 auf dem Canal de la Marne au Rhin eingerichtet. Dieses Oberleitungssystem ist heute noch in Betrieb und durchquert einen Tunnel, der fast 5 km lang ist.
Da die Kettenzug-Methode einige Nachteile hat, wie die Schwierigkeit, Kurven zu fahren, oder den Zeitverlust, wenn es viele Schleusen entlang des Kanals gibt, so daß das Kabel mehrmals aufgenommen und wieder abgelassen werden muß, läßt sich der französische Ingenieur Maurice Lévy von Standseilbahnen anstelle von Oberleitungsbussen inspirieren.
Im Jahr 1888 führt er in der Nähe von Paris, an der Kreuzung der Kanäle Saint-Maur und Saint-Maurice, eine Reihe von Experimenten mit Seilzügen durch. Hier gibt es keinen Motor auf dem Boot selbst, sondern dieses wird durch ein bewegliches Seil an jedem Ufer angetrieben, das auf mit Rollen versehenen Trägern parallel zum Kanal geführt wird. Das Seil wird von einem feststehenden Motor bewegt, der ebenfalls am Ufer angebracht ist, und die Boote werden mit Zugseilen am Seil befestigt. Das System ermöglichte eine Geschwindigkeit von 4 km/h und das Wenden und das Passieren von Schleusen verläuft viel reibungsloser.
Trotz der offensichtlichen Vorteile wird die Versuchsstrecke einige Jahre später wieder abgebaut, so wie auch ein ähnliches Experiment in Deutschland, und Lévy installiert sein einziges kommerzielles System auf dem Aisne-Marne-Kanal, um die Kähne durch den 2,6 km langen Mont-de-Billy-Tunnel zu ziehen - wobei das Kabel hier mit Dampfmaschinen bewegt wird. Das System bleibt bis in die 1940er Jahre in Betrieb.

Schiffschlepper
Nur eine elektrisch betriebene Standseilbahn wird tatsächlich gebaut und betrieben, und zwar auf zwei getrennten Abschnitten des Canal de la Marne au Rhin. Sie wird 1910 in Jarville, in der Nähe von Nancy, erfolgreich getestet und kurz vor Beginn des Ersten Weltkriegs von einem anderen französischen Ingenieur, Edouard Imbeaux, vollständig installiert. Eine Strecke ist 7 km lang und geht durch den 5 km langen Tunnel de Mauvages, die andere 5 km lang und führt durch den Souterrain de Foug. Die Linien werden bis 1933 betrieben und dann durch das o.e. einzige heute noch in Betrieb befindliche Trolley-Barge-System ersetzt.
Die einzige Methode, die sich zumindest regional durchsetzt, ist die alte und primitive Methode des Maultierschleppens auf dem Weg neben dem Kanal, wobei das langsame Tier wurde nun durch ein leistungsfähigeres ,mechanisches Maultier’ ersetzt wird, das an eine Draisine gekoppelt ist. Die Maschinen laufen entweder auf einem Gleis am Kanalufer - bei dieser Methode handelt es sich praktisch um eine Eisenbahn entlang des Ufers, wobei die Boote als Anhänger durch eine 50 m lange Schleppleine mit dem Motorwagen verbunden sind - oder auf dem Treidelpfad selbst.
In Frankreich wird nach einigen Jahren erfolgloser Versuche mit Dampflokomotiven auf dem Treidelpfad das erste ,elektrische Pferd’ 1895 von M. Galliot auf dem Kanal von Burgund getestet. Bei dem Fahrzeug handelt es sich um einen kleinen, dreirädrigen Wagen, der ohne Schienen auf der Schleppbahn auf Metallrädern fährt und einen Lastkahn mit einer Geschwindigkeit von 2,5 - 3 km/h ziehen kann.
Im folgenden Jahr richtet die Société de Halage Electrique die Technik auf einer 43 km langen Strecke des Canal de la Deûle und des Canal d’Aire von Béthune nach Douai in der Nähe der nordfranzösischen Stadt Lille ein. Nach anfänglichen Schwierigkeiten kann ab 1898 ein ganzjähriger Linienverkehr eingerichtet werden. Die Strecke wird bald auf 55 km bis nach Courchelettes verlängert, und im Jahr 1900 sind rund 120 dieser Elektrolokomotiven im Einsatz. Da die Metallräder sich jedoch nachteilig auf den Schleppweg auswirken, wird die Technik 1904 durch Traktoren auf Schienen ersetzt.
In Deutschland beginnen 1890 Versuche mit gewöhnlichen Dampflokomotiven auf dem Finowkanal. Die Ergebnisse sind spektakulär, denn die Maschinen können sieben Lastkähne mit einer Geschwindigkeit von 7 km/h ziehen, allerdings ist der Energieverbrauch sehr hoch, was das System unwirtschaftlich macht. 1898 wird hier das Lamb-System (s.u.) getestet, gefolgt 1899 von Versuchen mit einem elektrischen Traktor auf Schienen, der von dem Siemens-Ingenieur M. Kottgen entworfen worden war.
Auf einem 1,3 km langen Abschnitt des Teltowkanals wird dann 1903 ein mechanisches Traktionsverfahren installiert, das in den Jahren 1905/1906 mit 22 Fahrzeugen auf 70 km erweitert wird. Das Verkehrsnetz bleibt bis 1945 in Betrieb und wird dann von den Sowjets demontiert.
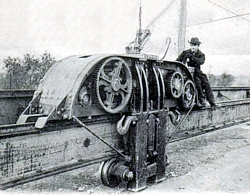
Auch in den USA werden elektrische Maultiere getestet, aber keines von ihnen wird jemals in Betrieb genommen. Eine Ausnahme bildet ein kurzer, teilweiser Einsatz auf dem Eriekanal in Ohio im Jahr 1900 über eine Strecke von 67 km, die eigentlich auf die gesamte Länge des Kanals von Toledo bis Cincinnatti von etwa 393 km ausgedehnt werden sollte. Hier abgebildet ist eine von der General Electric Co. gebaute Maschine abgebildet. Das Unternehmen geht jedoch in Konkurs und die bereits vorhandenen Gleise werden abgebaut.
Im Jahr 1901 wird in Belgien ein 16 km langer Abschnitt des Kanals zwischen Brüssel und Charleroi von Léon Gérard mit elektrischen Maultieren ausgestattet.
Eine letzte Methode, die hauptsächlich von den Amerikanern erforscht, aber schließlich nur in Frankreich angewandt wird, kombiniert alle zuvor beschriebenen Methoden. Das System besteht aus einem unbemannten elektrischen Maultier, das vom Lastkahn aus bedient wird und auf einer starren Schiene oder Zahnstange fährt oder an einem Kabel in der Luft hängt. Die unbemannten Lokomotiven, mit denen die Boote über ein Schleppseil und eine elektrische Leitung zur Steuerung verbunden sind, wird über eine Oberleitung mit Strom versorgt.
Viele verschiedene Systeme werden entworfen und getestet, von denen das von Richard Lamb erfundene System 1896 auf einem 6 km langen Abschnitt des Erie-Kanals bei Tonawanda und auf dem Raritan-Kanal in New Jersey praktisch umgesetzt wird. Die Idee ist, billigen Strom zu nutzen, der von den Niagara-Wasserfällen erzeugt wird, aber letztendlich geschieht nichts weiter.
Die spektakulärste Anwendung von unbemannten Maultieren wird von dem Franzosen Chéneau entwickelt. Die kleinen 600 km schweren Lokomotiven, die an einem Kabel in der Luft hängen, werden Zinzins genannt und ähneln dem Lamb-System. Parallel zum Kabel verläuft eine Oberleitung, die den Motor antreibt. Das System wird in den 1920er Jahren installiert und dient der Ein- und Ausschleusung auf einigen Kanälen in Nord- und Ostfrankreich.
Ein weiteres erwähnenswertes elektrisches Maultiersystem, das aber für andere Zwecke eingesetzt wird, ist immer noch im Panamakanal in Betrieb. In diesem Fall führen die elektrischen Maultiere die viel größeren Schiffe, die weiterhin ihre Motoren benutzen, anstatt sie zu ziehen.
Zurück zur allgemeinen Chronologie: Im Jahr
1898 besitzen die Unternehmen Immisch
Launch Electric Co. und Thames Valley Start
Co. jeweils etwa sechzig elektrische Boote auf der Themse,
die sie vermieten. Sie sind zwischen 4,5 m und 14 m lang. Daneben gibt
es etwa die gleiche Anzahl Boote in Privatbesitz, und die meisten der
großen Bootsbauer haben Erfahrung im Bau von Elektrobooten.

(1898)
Ebenfalls 1898 baut die Sergeants-Werft auf der Eel
Pie Themsen-Insel das 16 m lange Teakholz-Elektroboot Mary
Gordon, das bis zu 75 Erwachsene oder 120 Kinder befördern
kann.
Im November 1898 wird Nikola Tesla ein
Patent mit dem Titel ,Method Of And Apparatus For Controlling Mechanism
of Moving Vessels or Vehicles’ erteilt. Die Erfindung benötigt keine
Drähte oder elektrischen Leiter, da sie Schiffe oder Fahrzeuge bewegt,
indem sie Wellen, Impulse oder Strahlungen erzeugt, die durch die Erde,
das Wasser oder die Atmosphäre empfangen werden, solange das Objekt
innerhalb der effektiven Reichweite bleibt.
Das Patent soll übrigens auch Einzelheiten zu Teslas Vorhersagen über die Drohnenkriegsführung enthalten, die aufgrund ihrer „sicheren und unbegrenzten Zerstörungskraft“ den Frieden zwischen den Nationen herbeiführen - oder den Untergang der Menschheit bedeuten wird.
Um das Jahr 1900 herum entwickelt und verkauft die Submerged
Electric Motor Co. aus Menomonie, Wisconsin, einen der ersten
kommerziellen elektrischen Außenbordmotoren. Der durchdachte Motor
ist kompakt und wird hauptsächlich zum Antrieb kleiner Boote eingesetzt.
1903 werden von Elco in New Jersey 250 E-Boote zwischen 5,5 und 12 m Länge ausgeliefert. Kunden sind unter anderem das englische Königshaus, Zar
Nikolaus II, Großherzog Alexander
von Rußland, Thomas Edison, George
Westinghouse, Baron Rothschild und JJ
Astor.

(Original von 1903)
Noch heute fahren elektrische Kanus wie die ebgebildete Gena von 1903 auf
der Themse – und diese tut es sogar noch immer mit ihrem originalen
Elektromotor und dem ursprünglichen Steuersystem von damals.
...und zur technikgeschichtlichen richtigen Zuordnung: Der erste benzinbetriebene kommerzielle Außenborder von Waterman kommt erst 1906 auf
den Markt.
Am 07.04.1913 (anderen Quellen zufolge
bereits im August 1912) läuft das erste elektrisch
betriebene Schiff der US-Navy vom Stapel, die USS Jupiter (später
umbenannt in USS Langley). Das 19.360 t schwere
Schiff ist mit dem Prototyp eines Elektroantriebs ausgestattet, der
in den späten 1910er und den 1920er Jahre
zunehmend in den Kriegsschiffen der Navy eingesetzt wird.
1918 wird als erstes von drei Schiffen die USS New Mexico (36.000 t) mit Elektromotoren ausgestattet, deren Strom von vier Dampfturbinen erzeugt wird. Die 40.000 PS beschleunigen das Schiff auf 21,5 Knoten.

(1913)
Während des 2. Weltkriegs hatte die amerikanische Marine Begleitschiffe im Einsatz, die ebenfalls mit Dampfturbinen und elektrischen Antrieben ausgestattet waren.
Doch schon 1920 naht das Ende des Elektroantriebs – mit der Entwicklung leichter und einfach zu betankender Benzinmotoren. Qualm und Rauch kümmern dabei niemanden.
Einzige Ausnahme: Elektrisch betriebene U-Boote, die
keine Luft für
den Betrieb ihrer Dieselmaschinen benötigen und daher auch keine
verräterische Abgaswolke über der Meeresoberfläche
zeigen. Bei ihrer Entwicklung ist Deutschland führend.
Die deutschen U-Boote vom Typ XXI Elektroboot kommen allerdings zu spät, um den 2. Weltkrieg noch entscheidend beeinflussen zu können – doch technisch revolutionierten sie diese Waffengattung, die später teilweise auf Atomkraft umsteigen wird.
Es wird zwar tatsächlich noch mit dem Bau von 120 Stück der 76,7 m langen U-Boote mit einer Wasserverdrängung von 1.819 t (getaucht) begonnen, doch in Betrieb genommen werden im April 1944 nur zwei davon. Die mit drei Bänken von jeweils 124 Batterie-Zellen bestückten Boote erreichen unter Wasser eine Geschwindigkeit von 17,2 Knoten.
(Grafik)
Auf dem Titelbild der Ausgabe vom September 1933 des
US-Magazins Popular Science erscheint ein überaus seltsames
Gerät, das die Zukunft der Kreuzfahrtschiffe beschreiben will. Zu Beginn
des 20. Jahrhunderts sind Schiffe, die wie Räder über den Atlantik
rollen, der letzte Schrei.
Das abgebildete Fahrzeug, das treffend als ,rollender Ball’ bezeichnet wird, erhält Anfang der 1930er Jahre sogar ein Patent. Es wird hier erwähnt, weil das Schiff von dieselelektrischen Motoren angetrieben werden soll, die sich im Inneren der Kugel drehen, während die Passagiere bequem in dem flugzeugähnlichen Wagen darüber sitzen. Leider ließen sich bislang keine weiteren Details darüber finden.

von Connett
Ein frühes elektrisches Ein-Personen-Unterseeboot
wird 1938 von Barney Connett aus
Chicago gebaut, es gilt als eines der weltweit kleinsten U-Boote seiner
Zeit und ist mit zwei Batteriebänken ausgerüstet.
Barney unternimmt mit seinem als Fisch bemalten Boot mehr als 300 erfolgreiche Tauchgänge bis in eine Tiefe von gut 9 m, bei denen er Strecken bis zu 22 km zurücklegt.

von Gilpin
Joe Gilpin, ein Erfinder als Hollywood, macht Mitte 1948 von
sich reden, als er sich lässig auf einer Art batteriebetriebenem Skateboard
über das Wasser tragen läßt. Die Ruder sind beidseitig auf halber Länge
angebracht.
An der Entwicklung seines knapp 75 kg schweren, 3,8 m langen und 17,5 cm dicken Motorboards, das mit 8 Batterien ausgestattet ist, hat Gilpin vier Jahre lang gearbeitet. Er erreicht damit eine Geschwindigkeit von 11,2 km/h, kann das Gerät bis zu acht Stunden lang betreiben und dann über Nacht wieder aufladen. Gilpin will die Teile nun für jeweils 345 $ auf den Markt bringen.
In der Augustausgabe 1954 des US-Magazins Mechanix
Illustrated wird auf mehreren Seiten die Innovation eines gewissen
Ralph E. McCabe vorgestellt, der sich seit 1948 damit
beschäftigt,
Schiffe auf offener See mit der Energie des Salzwassers selbst (als
Elektrolyt) zu betreiben.
Hierfür entwickelt er eine Salzwasser-Batterie mit Kohlenstoff-Graphit-Platten für den positiven, und eine Nickel-Zink Elektrode für den negativen Pol. Die Batterie ist tatsächlich leistungsstark genug um ein kleines Boot anzutreiben. Im Laufe dieser sechs Jahre konstruiert und testet er 36 Modellboote.
(Grafik)
Sein aktuelles Modellboot Eighth Wonder of the World, das auch in dem Magazin vorgestellt wird, ist 47 cm lang und wird von seiner 1 V/3 A Batterie auf eine Geschwindigkeit von 8 km/h beschleunigt.
Die Salzwasser-Batterie kann horizontal oder vertikal unter dem Schiffsrumpf angebracht werden, wobei die Bewegung des Bootes für ihre fortlaufende Durchströmung mit Meerwasser sorgt. Um für seine Erfindung Werbung zu machen, plant McCabe eine Reihe von Bootswettrennen zu veranstalten... doch tatsächlich hört man später nie wieder von ihm - oder von seiner Inovation.
Die Bootswerft Heistracher mit Standort am Chiemsee
in Bayern baut bereits ab 1957 Motorboote mit Elektroantrieb,
da die Genehmigungen für Brennstoff-Motorboote am Chiemsee schon
damals beschränkt wurde. Die Motoren der Boote werden mit der
Zeit immer stärker, von anfänglich 300 W wachsen sie auf
inzwischen ca. 4 kW an.

Im Jahr 1959 erscheint ein Foto in dem
US-Magazin LIFE, das einen gewissen Dr. Max Shick in
seinem Motorboot zeigt, welches von einem großflächigen Solarpaneel
angetrieben wird.
Leider ließen sich bislang keine näheren Angaben darüber finden - über sachdienliche Hinweise würde ich mich daher sehr freuen, denn möglicherweise handelt es sich dabei um das tatsächlich erste mit Solarzellen betriebene Elektroboot der Welt.
Die nächste Meldung kommt erst gut zehn Jahre später. 1970 installiert der 16-jährige Marshall ‚Duffy’ Duffield auf
Vorschlag eines Freundes den Elektromotor eines Golf-Carts in das Boot
seines Vaters, um sich die Mühsal mit dem immer wieder ausfallenden
Benzinmotor vom Hals zu schaffen.

Als Jahre später Ray Godber, der damalige Präsident der Trojan Batterie Co., auf das mit Trojan-Batterien ausgestattete Boot aufmerksam wird, finanziert er sofort den Bau eines Prototypen mit neuem Design.
Seit 1998 hat die Duffy Electric Boat Co. in Adenalto, Kalifornien, gemeinsam mit der Trojan Batterie Co. über 3.000 Elektroboote für den kalifornischen Markt in Orange County, aber auch für Kanada, Mexiko, Europa und Fernost gebaut (Stand 2011).
Die sieben Modelle reichen von dem kleinen Duffy Cat 18 bis zu Booten der Aquabus-Größe, die Länge variiert zwischen 4,20 m und 6,30 m. Alle Schiffe besitzen speziell für den Einsatz auf See entwickelte 5 PS Elektromotoren von Advanced DC Motors, die eine Geschwindigkeit von gut 10 km/h erlauben, und sind mit 6, 8 oder 12 Batterien ausgestattet.
Bei einer Geschwindigkeit von 6,5 km/h beträgt die Reichweite acht Stunden. Zur Vermeidung von elektrolytischer Korrosionseffekten wird die Edelstahlschraube über einen Riemen angetrieben. Mitte 2011 startet der Wassertaxi-Service von The Pearl in Katar mit einem Duffy Elektroboot.

Als eines der ersten Exemplare seiner Art entwickelt das Office of Advanced Technologies and Programs der CIA den 1970er Jahren einen Charlie genannten Roboterfisch, dessen Antrieb durch ein Propulsionssystem im Schwanzbereich erfolgt. Die genaue Technik wird nicht detailliert beschrieben, es ist aber wohl ein elektrischer Antrieb.
Der 61 cm lange, 28 cm breite und 18 cm hohe Roboter-Forschungsfisch ist mit einem Druckkörper, Ballastsystem und Kommunikationssystem ausgestattet. Er soll unentdeckt Wasserproben entnehmen und zur Analyse zurückbringen, z.B. zur Untersuchung auf radioaktive oder biochemische Stoffe im Wasser. Gesteuert wird es über ein drahtloses Handfunkgerät mit Sichtverbindung. Mehr über Roboterfische findet sich in dem entsprechenden Schwerpunkt der Jahresübersicht 2012.
Im Folgenden gebe ich einen Überblick über den aktuellen Stand der Technik seit den 1980er Jahren, denn im Grunde nimmt das Interesse an E-Booten erst zu diesem Zeitpunkt wieder zu, gefördert durch die Einfuhr von günstigen Elektro-Außenbordern und motiviert durch den Gedanken an den Umweltschutz.
1982 wird von Admiral Lord Percy
Gick und Lord St.
Davids die Electric
Boat Association (EBA) gegründet. Doch es gibt einige
Firmen, die zu diesem Zeitpunkt schon mehrere Jahre Erfahrung vorweisen
können.
Der Gründer Dieter H. Seebacher startet um das Jahr 1990 in
Moosburg, Österreich, die Firma aquawatt Mechatronik und Yachtbau (später:
aquawatt Green Marine Technologies) und macht das Unternehmen damit
zu einem der Pioniere der Branche. Seitdem entwickelt und baut aquawatt
Elektroboote, Elektroyachten und Elektrobootsmotoren. Die Marke aquawatt
selbst wird 1993 für Marineausrüstung, Batteriesysteme
und Bootsantriebe registriert und geschützt.
Die Elektroboote und Motoryachten fallen von Anfang an durch ihr geringes Gewicht, eine hohe Effizienz und herausragende Fahrleistungen auf. Bereits 1995 präsentiert aquawatt das laut Fachpresse schnellste in Serie gebaute E-Boot. Zu den bekanntesten Modellen zählen später die 715/717-Yachten und das Flaggschiff E-Yacht 848 twin carbon – ein besonders energieeffizientes Gleitboot mit innovativem Rumpfdesign. Die Palette der Außen- und Innenbordmotoren reicht von 4,3 kW bis 50 kW Leistung, ergänzt durch eigens entwickelte Lithium-Ionen-Batteriesysteme mit modernem Batteriemanagement.
Nachdem Mitte der 1990er Jahre zuverlässige elektronische
Steuerungen verfügbar werden, steigen die Leistungen weiter an – bis
auf heute ca. 50 kW. Die 8,20 m langen Boote wiegen mitsamt ihren Bleiakkus
1,4 t und sind 18 km/h schnell. Die neuen Modelle werden nun auch mit
Lithiumbatterien ausgerüstet, die allerdings merklich teurer sind.
In Verbindung mit dem Kohlefaser-Leichtbau der Boote kommt man damit
allerdings auch in sehr viel höhere Geschwindigkeitsbereiche.
Auch der Schweizer Hersteller Boesch Motorboot AG am Zürichsee rüstet Sportboote auf Wunsch mit Elektromotoren und Lithium-Polymer-Batterien aus, wie sie normalerweise für Handys genutzt werden. Der 50 kW leistende Kräutler- Drehstrommotor ist dabei so effektiv, daß das Elektroboot als Zugfahrzeug für Wasserskiläufer genutzt werden kann.

von Boesch
12.000 Handy-Akkus aus asiatischer Produktion, die zu zwölf Batteriebänken mit 252 V zusammengefasst sind, speichern beim 6,50 m langen Boesch Electric Power 620 eine Kapazität von 120 Ah. Der für vier Jahre Lebensdauer garantierte Batteriesatz kostet rund 40.000 €, und bislang haben über zehn Eigner ein 620er oder das kleinere, knapp 5,70 m lange Elektroboot 560 gekauft.
Die Boote von Boesch, die aussehen wie Riva-Klassiker, sind auch zwei Jahrzehnte später noch sehr gefragt. Im Jahr 2011 macht der mehr als 90 Jahre alte Familienbetrieb ein Drittel seines Umsatzes mit elektrisch angetriebenen Booten und läßt pro Jahr 25 - 30 E-Schiffe der Modelle 560, 620 oder 710 zu Wasser. Die installierten 80 kW Elektromotoren schaffen knapp 55 km/h, wobei eine Variante mit 120 kW, die mehr als 60 km/h erreicht, bereits im Test ist.
Als Stromspeicher werden ab 2005 Lithium-Polymer-Akkus eines Militärausrüsters eingesetzt, die nur ein Viertel konventioneller Bleibatterien wiegen und besonders langlebig und wenig empfindlich gegenüber Temperaturschwankungen sind. Dafür schlagen die Elektroboote, die hauptsächlich in den Export gehen, auch mit umgerechnet 190.000 - 330.000 € zu Buche.
In den 1980ern entwickelt Rupert
Latham im britischen
Wroxham mit seinem Frolic electric launch einen neuen
Elektroantrieb für Boote. Seitdem hat er etwa 200 Stück
davon verkauft.
Das möglicherweise erste ‚richtige’ Solarboot in
Deutschland baut der Erfinder Heinz
Hayn bereits 1983. Drei Jahre später
fährt er mit seinem solarbetriebenen Katamaran den Nil hoch – 1.000
km weit. Als ich ihn 2005 kennenlerne, arbeitet er
gerade an einem Wasserstoffantrieb für Boote.
Bei Solarbooten handelt es sich im Grunde ja ebenfalls um Elektroboote – die nur zusätzlich noch ein unabhängiges, sauberes und geräuschloses Kraftwerk mit sich führen, das ihre Akkumulatoren stetig mit kostenloser Energie von der Sonne auflädt.

Solo
Die Firma International Venturecraft
(IVC) baut ab 1986 elektrisch betriebene Sport-Unterseeboote für
1, 2, 3 und 6 Personen (bis 2010 über 200 Stück).
Die Palette reicht vom kleinsten Modell SportSub Solo für 32.000 $ über ein Surveillance Sub für 83.000 $ bis zum größten Modell TourSub, das dann auch schon 520.000 $ kostet.
Das für 1 Person ausgelegte SportSub Solo beispielsweise wiegt rund 70 kg, kann bis zu eine Stunde lang in eine Tiefe von 10 m tauchen und wird von zwei drehbaren Propellern wie ein Hubschrauber bewegt.
Im September 1988 initiiert Norbert Wilms,
Chemie- und Physiklehrer an der Max-Beckmann-Oberschule in
Berlin, den 1. Berliner Solarboot-Cup auf dem Tegler See.
Die ursprünglich Berliner/Hamburger Veranstaltung wächst schnell zu
einem international angesehenen Event, das jährlich mehr Boote und
Interessierte an Sportstätten im In- und Ausland lockt. Wilms feiert
im August 2012 das 25. Jubiläum dser Veranstaltung
und erhält im Oktober für seine Arbeit den Bundesverdienstorden, immerhin
noch ein Jahr vor seinem Tod.
Nicht vergessen werden sollte, daß die 1. Solarboot-Regatta im Rahmen der Tour de Sol bereits Anfang Juli in Estavayer in der Schweiz stattfand.
Auch die erste amerikanische Solarbootregatta wird von einem Deutschen aus der Taufe gehoben: Prof. Hartmut Ginnow-Merkert, der später langjährig an der Kunsthochschule Berlin-Weißensee unterrichtet. Bislang habe ich keine Details darüber - Hilfe seitens der Leserschaft wäre daher erfreulich.
Ein besonderes Elektroschiff ist die Vaporetto Elettrico
E-1 in Venedig. Das 1989 in Betrieb genommene
Schiff ist 23 m lang, 4,6 m breit, wiegt 35 t und bietet Raum für
208 Passagiere. Aufgrund der langen Ladezeiten wird es jedoch drei
Jahre nach Inbetriebnahme wieder ausgemustert.

Ebenfalls 1989 fährt Lady
Fiona,
Countess of Arran, im Alter von 71 Jahren (!) in ihrem Elektro-Rennboot An
Stradag mit 81,83 km/h einen Geschwindigkeitsweltrekord für
E-Boote, der lange Zeit ungeschlagen bleibt.
Das Schiff wird bis Anfang 2005 im Lakeland Motorboat Museum in Cumbria ausgestellt, dann kauft es Henry Engelen und läßt es von der Bootswerft Henwood & Dean's nahe Henley überholen und ausbauen. Es bekommt vier neue 25 kW Motoren des indischen Herstellers Agni Motors, sowie Exide AS45R 12 V Batterien von Chloride Motive Power.
Mit der Pilotin Helen Loney an Bord fährt das Boot des Electric Record Team UK mit 109,55 km/h Durchschnittsgeschwindigkeit und 113,11 km/h Spitze am 01.11.2005 einen neuen Weltrekord ein. Für einen weiteren Rekordversuch arbeitet das Team an dem Elektro-Rennboot Firefly (s.u.).

1989 beginnt auch die Firma Systec in Spay am Rhein
mit Unterstützung des BMFT die Entwicklung – und ab 1991
den Bau des ‚ersten serienmäßig hergestellten’ Solarboots
auf einer Bootswerft in Bad Zwischenahn.
Der 7 m lange Solist ist mit 9 m2 Solarzellen und einem 3 PS Elektromotor bestückt, was eine Geschwindigkeit von 10 km/h erlaubt; er bietet Platz für 4 - 6 Personen und soll für 120.000 – 140.000 DM angeboten werden. Die Ladezeit der Batterien beträgt allerdings zwei Tage, vermutlich mit ein Grund, daß es mit der Serie dann anscheinend doch nichts wurde, obwohl das Boot 1992 verschiedentlich auf Probefahrten vorgestellt wird.
Im September 1989 wird am Berliner Pichelssee das
Solarboot Anna getauft, das bereits vor zwei Jahren
von der Bootsbaufirma Adlung & Kaiser auf Kiel gelegt worden war.
Auf dem Dach des Bootes für 10 – 12 Personen befinden sich 20 Solarpaneele mit insgesamt 1 kW Leistung, die Batterie alleine läßt einen Wasserweg von 60 km zu. Von den Baukosten von 100.000 DM entfallen 14.000 auf die Solarzellen. Das BMFT stiftet einen Datenlogger, um günstig an Erfahrungswerte zu kommen.

Zu dieser Zeit fährt auch über den Bodensee schon
ein Solarboot – die 7,2 m lange Korona von von Prof. Christian
Schaffrin und Studenten der Hochschule Konstanz (HTWG),
die in Teilen der akademischen Welt Deutschlands als das „erste
Solarboot der Welt“ gilt. Es kann bis zu sechs Personen befördern
und die knapp 10 m2 Solarzellen versorgen einen 3 PS Motor,
der es mit einer Geschwindigkeit von bis zu 12 km/h vorantreibt. Die
Batterien erlauben eine Reichweite bis 70 km, bei Sonnenschein ist
die Reichweite prinzipiell unbegrenzt.
Die Korona hatte schon im Vorjahr 1988 die erste Solarboot-Regatta auf dem Neuenburger See in der Schweiz gewonnen. Genau 20 Jahre später wird sie einer Generalüberholung und einem technischen Upgrade unterzogen, um im Juni an der Frisian Solar Challenge 2008 teilzunehmen. Mehr über diese findet sich in der Übersicht 2010.
Die 1990er Jahre
1993 wird die 1. Deutsche Solarboot-Meisterschaft durchgeführt,
bei der Thomas Meyer mit seinem Berliner Kanu Carl alle
Rennen gewinnt. Auch eine Solarboot-Europameisterschaft
findet in diesem Jahr zum ersten Mal statt.
Ebenfalls ab 1993 fördert die Bundesstiftung
Umwelt mit über 1,2 Mio. DM eine Umweltinformationskampagne zum
Thema ‚Tourismus und Wassersport am Bodensee’ – bei
der auch für Solarboote geworben wird.
Im selben Jahr beginnt
der 1991 gegründete
Verein zur Förderung von Solartechnik im Wassersport-
und Freizeitbereich Berlin-Köpenick e.V. mit den Vorarbeiten
zum Bau einer Solarstrom-Tankstelle für Solarboote, die dann 1995 als ‚Weltneuheit
im Rahmen der Weltklimakonferenz’ im (sehr abgelegenen) Strandbad
Wendenschloß mit ihrem Betrieb als Vermietstation für 20
Solarboote mit 2 - 8 Sitzen beginnt – allerdings nur zwei
Jahre lang. Später wird daraus dann der ‚Solarpavillon
Köpenick’ (s.u.).

Die ersten kommerziellen Solarschiffe werden 1995 von
MW-Line im schweizerischen Yverdon gebaut. Die 8,5 m langen Solifleur und
die Chlorophylle sind jeweils für
12 Personen angelegt, haben einen 824 W Solargenerator sowie einen
4 kW Motor, und werden von Pro Natura für Touren über
den See von Neuchatel genutzt. Ihre Batteriereichweite beträgt
3,5 h bei einer Fahrtgeschwindigkeit von 10 km/h.
Später bekommen die Schiffe die Bezeichnung Aquabus 850, und MW-Line baut weitere drei Stück vom Modell Aquabus 1050 (s.u.) für den Genfer See, die jeweils 25 Passagiere befördern können. Sie sind seit 1999 dort im Einsatz, ein viertes Boot in Milano. Das Unternehmen elektrifiziert allerdings auch andere Schiffe, wie beispielsweise die 20 m lange Bécassine.
Zum Hintergrund: Der ursprüngliche Hersteller des Aquabus 850 und 1050 ist die Firma MW-Line. Später werden die Aktivitäten und Modelle von der 2010 gegründeten Firma Grove Boats SA mit Sitz in Grandson im Kanton Waadt übernommen und weiterentwickelt.
Ende 1995 wird in Venedig auf dem Canal Grande das
erste mit Sonnenenergie betriebene Vaporetto in
Betrieb genommen. Diesmal folgt anscheinend keine schnelle Ausmusterung
wie beim rein elektrischen Vorgänger.

OV1
Ab 1995 entwickelt
und konstruiert die Firma SEAmagine Hydrospace
Corp. elektrisch betriebene
Tauchgeräte für 2 – 3 Personen und Tauchtiefen bis über 900 m.
Die Besonderheit der Systeme besteht aus ihrer kugelförmigen Acrylglas-Kabine, in der normaler Luftdruck herrscht. Hier abgebildet ist das Model OV1.
Am 20. März 1996 startet der Japaner Kenichi
Horie mit seinem Solarboot Malt’s Mermaid im
ecuadorianischen Hafen Salinas – und erreicht nach 183 Tagen
Ende August wohlbehalten Tokio.

Malt’s Mermaid
Die Solarzellenpaneele liefern 1,5 kW an die Nickel-Wasserstoff-Batterien, die wiederum das Boot antreiben und Kühlschrank, Videokamera und Funkgerät versorgen.
Das Boot selbst besteht teilweise aus 27.000 leeren Bierdosen – ein klarer Hinweis auf den Hauptsponsor, einen Bierhändler.
Horie hatte schon 1964 unter dem Titel Kodoku – Sailing alone across the Pacific den Erfahrungsbericht seiner ersten Überquerung von 1962 veröffentlicht, 1999 fährt er dann mit der aus recycelten Bierfässern bestehende Malt’s Mermaid II von San Fransisco aus nach Japan – und 2002 mit der Malt’s Mermaid III wieder retour.
Elektrisch angetriebene Klein-U-Boote für Forschungszwecke
gibt es bereits seit den 1980er Jahren. In den 1990ern wird
ihre Entwicklung zunehmend durch das Interesse der Filmindustrie gefördert.

Als Aufnahmeplattform für IMAX Film baut die US-Firma Hawkes Ocean Technologies (H.O.T.) in der San Francisco Bay Area 1997 die Wet Flight, die mit einem 10 kW Motor ausgestattet ist, dessen Batterien Arbeitszeiten bis zu zehn Stunden erlauben, bei einer Tiefe bis zu 150 Fuß.
Vom selben Unternehmen ließ sich übrigens Steve Fossett das Tiefsee-Tauchboot Deep Flight Challenger entwickeln und bauen, mit dem er bis in 37.000 Fuß Tiefe vorstoßen und damit einen ultimativen Tauchrekord setzen wollte. Durch seinen unerwarteten Tod im September 2007 konnte dieses Projekt jedoch nicht verwirklicht werden. Über weitere Projekte der Hawkes Ocean Technologies wird weiter unten berichtet.
Das erste speziell für den Solarbetrieb komplett neu entwickelte
Boot wird erstmals 1997 von der Sulzer
Kopf AG vorgestellt.
Das futuristische Design der Ra 31 begeistert – auch
wenn es eindeutig ein ‚Schönwetter-Boot’ ist. Ich
komme etwas weiter unten noch auf die gesamte Produktpalette des Unternehmens
zu sprechen.
Im Mai dieses Jahres geht die erste Solartankstelle
für
Elektroboote in Brandenburg in Betrieb. Die für 37.000
DM errichtete 1,8 kW Anlage befindet sich auf einer Bootswerft am Großen
Zernsee.

1998 stellt der traditionelle österreichische
Bootsbauer SUEK GmbH einen solaren Katamaran für bis zu 58 Personen
vor, der für touristische Fahrten auf der Donau eingesetzt wird.
Die Sonnenschein wird später an die Saarbrückener Personenschiff GmbH verkauft. Sie ist 15 m lang, 3,9 m breit, wiegt 10 t und besitzt zwei Motoren von jeweils 6 kW, die von einem Solardach mit einer Leistung von 5 kW versorgt werden.
Ebenfalls 1998 gründet der Schiffbauingenieur Jörg
Albrecht in Berlin die Firma Techno Consult als Ingenieursbüro für maritime Gutachten und Konstruktionen.
Zu den wichtigsten Projekten gehören ein solares Wassertaxi (bereits 1995 gemeinsam mit dem Designer Jan Sokoll entwickelt), der Suncat 2000 (unter der Leitung von Thomas Meyer und in Zusammenarbeit mit dem Designer Jan Petzold im Jahr 1996 entwickelt), sowie das Konzept des über 40 m langen Solarschiffes Millennium One (gemeinsam mit Prof. Schneider von der UDK-Berlin, 1999).

Wassertaxi
Zu diesem Zeitpunkt legt Albrecht auch das Konzept einer regulären Route für Wassertaxis zwischen der Fischerinsel in Berlin-Mitte und der Halbinsel Stralau vor, das jedoch am hartnäckigen Wiederstand der konventionellen Schiffahrtsanbieter scheitert, die der Nutzung der vorhandenen Anlegestellen zustimmen müßten.
2004 entwickelt Jörg Albrecht dann den Solarcruiser Mimbi für die Urwaldgebiete Südamerikas, ein multifunktionales Solarschiff, welches eine Kombination aus ‚Amazonas Kreuzfahrer’ und ‚Infrastrukturschiff’ darstellt.
2006 wird eine Kooperation mit dem Solarzellenhersteller Sharp ins Auge gefaßt, denn Boote mit Elektromotoren sind noch immer ein Nischenprodukt, wie beispielsweise Zahlen vom Bodensee deutlich machen: Trotz strenger Abgasnormen gibt es um die Jahrtausendwende nur rund 580 Boote mit elektrischem Antrieb auf dem See, also gerade einmal 1 % aller dort registrierten motorisierten Wasserfahrzeuge.

1998 wird in Frankreich die Elektrofähre La
Rochelle in der gleichnamigen Stadt in Betrieb genommen.
Sie ist mit 660 kg Nickel-Cadmium Batterien (80 Ah) ausgestattet,
was ihr eine Fahrzeit von 10 Stunden erlaubt.
Der Katamaran besitzt zwei 6 kW Motoren, wiegt 4,2 t und bietet 30 Personen Platz. Mit 10 m Länge und 3,5 m Breite kann das Schiff eine Höchstgeschwindigkeit von 15 km/h erreichen.
Im April und Mai 2009 wird die Fähre dann durch zwei neue Solarboote namens Copernic und Galilée ersetzt, die eine Kapazität von 75 Personen haben. Die Gesamtinvestition dafür beträgt rund 1,8 Mio. €.

Ende 1999 beginnen ebenfalls in Frankreich die Ecole
Navale und das Lycée La croix rouge mit
ihrem Projekt Lestreol (von Lestr = Kessel,
und Heol = Sonne).
Es entsteht ein sehr ästhetisches, solarbetriebenes zweisitziges Boot, das 6,47 m lang und 1,67 m breit ist, es wiegt 160 kg.
Die Spitze erinnert unweigerlich an einen Militärjet – aber schließlich war ja auch die französische Marine maßgeblich an der Entwicklung beteiligt. Bei 6 kn Geschwindigkeit kann das Boot mit einer Batterieladung 3 Stunden lang fahren.

Eine der größten Werften für Solarschiffe ist die Kopf
Solarschiff GmbH in Sulz am Neckar. Das Unternehmen war bereits 1975 in die Solartechnik eingestiegen. 1995 beginnt man in Kooperation mit der Universität
Stuttgart und dem Designer Christoph
Behling mit der Entwicklung eines Solarkatamarans, und im Jahr 2000 sind schon fünf Modelle im Angebot.
Eines davon ist der bereits erwähnte 9,4 m lange und 1,6 t schwere Katamaran RA 31 für 12 Personen. Die beiden jeweils 4,7 kW Motoren erlauben eine Fahrtgeschwindigkeit von 13 km/h mit Batterieunterstützung, und knapp 7 km/h im reinen Solarbetrieb.

Das 100.000 DM teure Schiff wird ab Juni 1998 als Solarfähre auf dem Bodensee zwischen Gaienhofen in Deutschland und Steckborn in der Schweiz genutzt.
Es wird später von einer 22 m langen RA 66 ersetzt, die schon 50 Personen nebst 20 Fahrrädern Platz bietet. Eine weitere RA 66 – in nur 6 Wochen gebaut – ist auf dem Maschsee in Hannover im Einsatz.
Installiert sind übrigens Solarmodule der Firma Sunovation GmbH (später: Mage Sunovation GmbH), die mit schwarzen, monokristallinen Zellen der ASE bestückt sind.
Weiter mit den Elektro- und Solarschiffen...