Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
2020 (C)
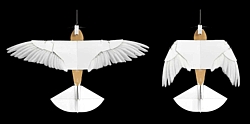
Im Januar 2020 veröffentlichen Ingenieure der Standford
University um David Lentink zwei Berichte
über die Entwicklung eines Flugroboters mit echten Taubenfedern,
den sie PigeonBot taufen. Um zu versuchen, insbesondere
die Steuerung des Gleitflugs durch Tauben auf ein Fluggerät zu übertragen,
untersucht das Team zunächst die Flügel toter Tauben und versucht
dann, sie so gut wie möglich nachzubauen. Biologen betrachten die
Vogelflügel als eine Art Hand und sprechen daher auch von Handgelenk
und Fingern.
Die Wissenschaftler finden anhand der Flügel und ihrer Modellierung im Computer u.a. heraus, daß die Winkel von nur zwei Gelenken 97 % der gesamten Flügelform erklären: das sogenannte Handgelenk und das Gelenk des Fingers, mit dem die äußeren Flügelfedern verbunden sind. Dabei wird nicht jede Feder einzeln von den Tauben gesteuert, vielmehr sind die Federschäfte mechanisch miteinander verbunden. Im PigeonBot übernehmen elastische Bänder zwischen den Federn diese Aufgabe.
Der PigeonBot hat einen Rumpf aus Hartschaum und ist mit GPS, Fernsteuerung, einen Motor mit Propeller sowie Aktuatoren für die Gelenke bestückt, während an den Flügeln insgesamt 40 Flugfedern von Tauben befestigt sind. Wenn im Flug Hand und Finger eines Flügels zum Körper hin bewegt werden, dann fliegt der Robotervogeleine Kurve in die Richtung dieses Flügels, wobei das Handgelenk eine grobe Kontrolle und der Finger die Feinsteuerung ermöglichen.
Es zeigt sich, daß Taubenfedern viele Vorteile haben: sie sind sehr weich, leicht, robust und ermöglichten elastische Reaktionen auf unterschiedliche aerodynamische Belastungen. Hinzu kommt das Phänomen, daß wenn überlappende Flugfedern beim Strecken des Flügels auseinandergleiten, ein Mechanismus verhindert, daß sie sich ganz voneinander trennen.
Mithilfe von Elektronenmikroskopie und mechanischen Tests finden die Forscher heraus, wie das System funktioniert: Im Flug verhaken sich Tausende von Flimmerhärchen auf den unten liegenden Federn in den kleinen Ästen der oben liegenden Federn. Dies verhindert beim Spreizen der Flügel, daß Lücken in der Flügelfläche entstehen. Wenn der Flügel zum Körper hin gezogen wird, lösen sich die verhakten Flimmerhärchen wieder – mit einem Geräusch wie beim Öffnen eines Klettverschlusses.

Brown University
Zeitgleich erscheint ein Artikel von Forschern der Brown
University um Matteo
Di Luca und Kenny Breuer, die ebenfalls ein
neues Flügeldesign entwickelt haben, das von Vögeln
und Insekten inspiriert ist. Dieser Flügel hat eine Vorderkante, die
zwar Turbulenzen verursacht, bei plötzlichen Winden und anderen Turbulenzen,
die kleinen Drohnen normalerweise Probleme bereiten, aber die Leistung
verbessert.
Im Gegensatz zur glatten, abgerundeten Vorderfläche, die für Flugzeugflügel typisch ist, weist das neue Design eine scharfe, flache Kante auf, welche die auf den Flügel auftreffende Luft zu einer abrupten Trennung zwingt. Bei größeren Flugzeugen würde dieser Strömungsabriß zu Problemen führen, bei kleineren Fliegern ist er hingegen eher von Vorteil, da die Abtrennung der Strömung an der Vorderseite des Flügels dazu führt, daß sie sich vorhersehbar an der Rückseite des Flügels anlagert – was bei Flugzeugen mit einer Spannweite von weniger als 30 cm wiederum die Flugeffizienz erhöht.
Ein Nebeneffekt der verbesserten Stabilität ist eine effizientere Nutzung der Batterie und damit eine längere Flugzeit. Im Windkanal werden bereits drei Stunden erreicht. Außerdem kann das das neue Flügeldesign viel dicker und stärker sein als herkömmliche Flügel. Dies bedeutet, daß es eventuell Komponenten aufnehmen kann, was der Gesamtkonstruktion mehr Flexibilität verleiht und den Rumpf reduziert oder sogar überflüssig macht.
(Montage)
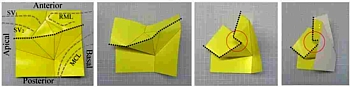
In einem weiteren Bericht, der im April im US-Magazins Science
Robotics erscheint, beschreiben koreanische Wissenschaftler, wie
sie sich die Flügelfalttechnik von Marienkäfern zum
Vorbild genommen haben, um fliegende Roboter zu konstruieren. Immerhin
sind diese Insekten Meister des Origami, der Kunst des Faltens: Unter
ihrem gepunkteten Schutzpanzer sind zarte Flügel auf engstem Raum zusammengefaltet,
die in kürzester Zeit entfaltet werden, um nach der Landung wieder
unter den Deckflügeln verstaut zu werden.
Die Forscher um Kyu-Jin Cho an der Seoul National University stützten sich dabei u.a. auf eine 2017 erschienene Studie von Kazuya Saito an der Universität Tokio, bei welcher der Faltprozeß mit Hilfe von Hochgeschwindigkeitskameras erstmals genau dokumentiert worden ist. Um diese Fähigkeit technisch nachzubilden, weichen sind Cho und sein Team allerdings vom Prinzip des Origami ab, da dieses die einzelnen Faltsegmente üblicherweise als starr betrachtet.

Flügelfalttechnik
Stattdessen wird für die Flügel des Robotergleiters ein nachgiebiger Kunststoff verwendet, bei dem einzelne Facetten im Ruhezustand gerundet sind, aber flach gedrückt werden, wenn die Flügel zusammengefaltet werden. Die dadurch gespeicherte Energie beschleunigt den Prozeß der Entfaltung, wobei die gerundete Geometrie gleichzeitig erlaubt, daß die entfalteten Flügel von selbst einrasten. Auf diese Weise kann der Robotergleiter innerhalb von nur 116 Millisekunden die Flügel ausbreiten, die das 150-fache ihres eigenen Gewichts tragen und starken aerodynamischen Belastungen standhalten können.
Der konstruierte Gleiter hat eine Spannweite von 660 mm, und die Flügel können auf ein Achtel ihrer Fläche zusammengefaltet werden. In diesem Zustand kann sich der Roboter kriechend fortbewegen, bei einem Sturz aber rasch die Flügel entfalten und sicher landen. Auch mit aktiv angetriebenen Flügeln wird das Verfahren erfolgreich erprobt.
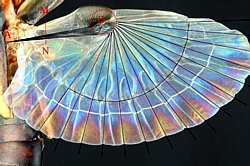
In diesem Zusammenhang sind auch die Ergebnisse eines britisch-japanischen
Forscherteams um Prof. Zhong You zu erwähnen, die
im Juli publiziert werden. Beteiligt daran sind Experten der Kyushu
University, der Hokkaido University, der University
of Tokyo sowie der University of Oxford.
Im vorliegenden Fall lassen sich die Wissenschaftler von den Flügeln der Ohrwürmer (Dermaptera; auch als Ohrenkneifer bekannt) zu einer neuer Falttechnik inspirieren. Zwar gibt es viele Insekten, deren Flügel sich bei Nichtgebrauch unter einer Abdeckung zusammenfalten, die Flügel der Ohrenkneifer sind am kompaktesten.
Als das Team mit Hilfe der tomografischen Bildgebung die gefalteten Hinterflügel des Ohrwurms untersucht, entdeckt es ein komplexes und einzigartiges Faltmuster, das laut Fossilnachweis seit mindestens 280 Mio. Jahren unverändert geblieben ist. Dieses Muster sorgt nicht nur dafür, daß die relativ zerbrechlichen Hinterflügel sicher unter den robusteren Vorderflügeln verstaut sind, sondern ermöglicht es ihnen auch, so flexibel zu bleiben, daß das Insekt nicht behindert wird, wenn es im Boden wühlt oder sich durch enge Räume zwängt.
Um den Faltmechanismus zu kopieren, wird das Muster zuerst mit klassischen Zeichentechniken nachgebildet und anschließend ein Computerprogramm entwickelt, das Benutzern zeigt, wie sie das Muster auf flache Objekte verschiedener Formen, Größen und Materialien anwenden können. Man hofft nun, daß die Falttechnik nach ihrer Weiterentwicklung für Gegenstände wie ausklappbare Drohnenflügel, Antennenreflektoren oder PV-Paneele an Raumfahrzeugen eingesetzt werden kann – aber auch für ultrakompakte Ventilatoren und Regenschirme.
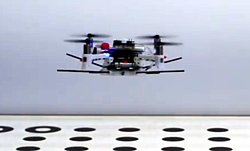
Ein weiteres internationales Wissenschaftlerteam unter der Leitung
von Prof. Richard J. Bomphrey vom Royal Veterinary
College (RVC) in Hatfield veröffentlicht im Mai 2020 eine
Studie, bei der es darum geht, eine Orientierungsmethode von Insekten
auf fliegende Roboter zu übertragen, um deren Kollisionsvermeidung zu
verbessern. Das Team bezieht sich dabei auf die Beobachtung von Mücken
(Culex quinquefasciatus), die den Kontakt mit Oberflächen meiden, auch
wenn diese für ihre Augen unsichtbar sind.
Die Insekten haben die Fähigkeit zur Wahrnehmung von feinsten Luftdruckveränderungen, die sie dem Johnstonschen Organ verdanken, benannt nach dessen Entdecker Christopher Johnston. Es gilt als eines der empfindlichsten mechanorezeptiven Organe im gesamten Tierreich. Stechmücken beispielsweise können bereits Verbiegungen ihrer Antennenhärchen von 0,0005° wahrnehmen, die durch Bewegungen von Luftpartikeln in der Größenordnung von 11 nm bewirkt werden, und reagieren auf Luftströme von 0,1 µm pro Sekunde.

(Grafik)
Die Wissenschaftlern verfolgen die Hypothese, daß hierfür die durch den Flügelschlag der Insekten erzeugten aerodynamischen Turbulenzen verantwortlich sind, die sich in der Nähe zum Boden oder zu Wänden verändern. Als Beispiel führen sie die Kinematik der Flügelschläge von Moskitos an, die sich durch eine hohe Frequenz, niedrige Amplitude sowie große, schnelle Rotationen in Spannweitenrichtung kennzeichnen.
Dies führt zu unorthodoxen aerodynamischen Strömungen an den Flügeln selbst und zu zwei konzentrierten, schnellen Luftstrahlen, die sich ungefähr zwei Flügellängen unterhalb des Insekts vereinen und auch stärker fokussiert sind als bei anderen fliegenden Lebewesen, was wiederum zu einem stärkeren Signal bei Annäherung an den Boden oder eine andere Fläche führt. Zudem stellen die Forscher fest, daß die Culex-Mücke mittels dieser Methode Oberflächen in einer Entfernung von mehr als 20 Flügellängen erkennen kann – viel weiter als bisher angenommen.
Nach der Durchführung Hochgeschwindigkeitsaufnahmen und Simulationsrechnungen wird das Verfahren mit dem nur 27 g wiegenden open source-Quadrokopter Crazyflie 2.0 umgesetzt, der hierfür mit fünf Drucksensoren ausgestattet wird. Nach einer Reihe von Testflügen wird die kleine Drohne dann autonom fliegen gelassen – und tatsächlich gelingt mit Hilfe des Sensormoduls die Hinderniserkennung bis zu einer Entfernung von drei Rotordurchmessern.
Im Unterschied zu anderen Lösungen, die mit aerodynamischen Messungen arbeiten, sind bei der neuen Methode keinerlei Modelle erforderlich, weder von der Aerodynamik noch von der Drohne selbst, weshalb diese nicht nur hinsichtlich der Masse und des Energieverbrauchs sehr sparsam ist, sondern auch bei der erforderlichen Rechenleistung. Die Forscher gehen davon aus, daß sich die Fähigkeit zur Erkennung von Oberflächen auch auf Hubschrauber übertragen ließe, um diese beim Fliegen in tückischen, schlecht sichtbaren Umgebungen etwas sicherer zu machen.

(Grafik)
Der Designer Hong Zhi übernimmt seinerseits menschliche
Knochen als Vorbild für einen Drohnen-Korpus da Knochen vielleicht
das beste Beispiel für die Art und Weise sind, wie die Natur ein strukturelles
Gerüst bereitstellt, das stark und robust, aber dennoch minimal ist.
Das selbe strukturelle Gerüst kann, wenn es leicht verändert wird,
Menschen dazu bringen, Ziegelsteine mit der Faust zu zerbrechen, während
es gleichzeitig leicht genug ist, um Vögel fliegen zu lassen. Es sind
genau diese beiden Eigenschaften, die Zhis Konzept zu erreichen versucht.
Der strukturelle Aufbau der im April 2020 veröffentlichten Skelett-Drohne verhindert das Entstehen von Schwachstellen und ihr inhärentes Design löst alle Festigkeits- und Belastungsprobleme, während es gleichzeitig das Volumen drastisch reduziert. Sogar das Gehäuse der Drohne, das normalerweise einen Computer, einen Akku und eine Kamera beinhaltet, ist auf ein Minimum reduziert, was sie sowohl physisch als auch visuell leicht macht, zur gleichen Zeit aber stabiler als so gut wie alle anderen Drohnen auf dem Markt.
Die weitere Umsetzung scheint die 2017 gegründete Firma Arris zu übernehmen, ein Unternehmen für Fertigungstechnologie mit Hauptsitz in Berkeley, Kalifornien.

Mitte Mai 2020 führt eine Drohne ihren erste Testflug
durch, die im Laufe der vergangenen zwei Jahre von zwei Studentengruppen
des israelischen Technion unter der Leitung von Lucy
Edery-Azulay und Prof. Daniella Raveh sowie
in Zusammenarbeit mit dem israelischen Verteidigungsministerium entwickelt
und anschließend per 3D-Druck hergestellt wurde.
Die Formgebung basiert darauf, daß eine der Lösungen, den Treibstoffverbrauch bei Flugzeugen zu senken, darin besteht, leichte Flugzeugstrukturen mit einer großen Flügelspannweite zu entwerfen und so die Widerstandskräfte zu verringern. Das Leichtflugzeug, dessen Flügel relativ flexibel sind, zeigt nach seinem ‚Start‘ vom Dach eines schnell fahrenden Autos aus, daß es in der Lage ist, auf Meereshöhe gerade und horizontal zu fliegen, einschließlich Manövern. Informationen über das Startgewicht o.ä. gibt es keine.
Das 3D-Flugzeug mit einer Flügelspannweite von 3 m ist auch ein Testfeld für die Erprobung neuer Ideen. So soll das A3TB (Active Aeroelastic Aircraft Testbed) z.B. als eine Versuchsplattform zur Untersuchung von Phänomenen im Zusammenhang mit der Flexibilität von Tragflächen dienen. Die Gruppe arbeitet derzeit an einem automatischen Kontrollmechanismus, der in den Folgemonaten in die zweite Generation des Flugzeugs namens A3TB-G2 eingebaut werden soll.

Auf der diesjährigen Robotik-Konferenz ICRA im Juni präsentieren Amanda
Bouman und ihr Team vom Caltech eine Drohne,
die mit einer Art Kanone gestartet wird und erst danach ihre Rotoren
entfaltet und in Gang setzt. Ähnliche Systeme sind schon mehrfach in
Verbindung mit militärischen Drohnen vorgestellt worden – doch noch
nie in Form eines Hexakopters. Die Forschung wird vom Jet Propulsion
Laboratory und der Defense Advanced Research Projects Agency (DARPA)
finanziert.
Das Design nennt sich SQUID (Streamlined Quick Unfolding Investigation Drone) und knüpft an eine vorangegangene kleinere Version µSQUID an, die von einem mit fast 90 km/h fahrenden Auto gestartet werden konnte, allerdings gesteuert von einem Operator mit Sichtkontakt. Bei der SQUID erfolgt der Übergang von der ballistischen zur aktiven Flugphase dagegen mit Hilfe von Sensoren an Bord komplett autonom. Die Stabilisierungsflossen und die Rotorarme des Hexakopters entfalten sich mittels vorgespannter Federn unmittelbar nach Verlassen der Startröhre. Sobald die Rotoren die nötige Drehzahl erreicht haben, übernehmen sie die Kontrolle.
Für ihre Experimente starten die Forscher die gut 15 cm durchmessende und 3,3 kg schwere Drohne mittels einer mit Druckluft funktionierenden ‚T-Shirt-Kanone‘. Mit einem Druck von 6,9 Bar läßt sich die Drohne 32 m hoch schießen, wobei sie Belastungen von etwa 21 G aushalten muß. Zukünftig soll sie in schwierigen Windverhältnissen getestet werden. Außerdem soll die Entfaltung der Flossen und Rotorarme verzögert werden, um die Reichweite für den ballistischen Flug zu vergrößern.
Ebenfalls im Juni berichten die Fachblogs über ein kleines unbemanntes
und solarbetriebenes Bodeneffektfahrzeug, das von den Ingenieuren
der Polytechnischen Peter-der-Große-Universität Sankt Petersburg unter
der Leitung des Forschers Alexei Maistro gebaut
wird. Russland experimentiert seit langem mit Bodeneffektfahrzeugen
(Wing-in-Ground-Effect, WIG), vor allem mit den riesigen Ekranoplan-WIGs
aus den 1960er Jahren.

Als eine Art Kreuzung zwischen einem Flugzeug und einem Boot nutzen Bodeneffektfahrzeuge die Vorwärtsgeschwindigkeit, um Auftrieb zu erzeugen, während gleichzeitig unter ihren relativ kurzen und gedrungenen Flügeln ein Luftkissen entsteht. Dadurch können sie knapp über der Wasseroberfläche fliegen – viel schneller als ein Boot, aber mit weniger Treibstoffverbrauch als ein herkömmliches Flugzeug.
Das neue WIG trägt den Namen Storm-600 und ist für den autonomen Betrieb konzipiert. Hierfür hat es eine GPS-gestützte Navigation, einen konventionellen Radar auf der Grundlage von Funkwellen sowie ein LiDAR-System an Bord, mit denen es Hindernisse erkennen und umgehen kann.
Die Batterien für die Elektromotoren werden von einer Reihe von PV-Paneelen auf der Oberseite des Fahrzeugs gespeist, so daß das Fahrzeug lange Zeit im Einsatz bleiben kann, ohne zum Aufladen zu einem Stützpunkt zurückkehren zu müssen. Die theoretische Höchstgeschwindigkeit liegt derzeit bei 200 km/h, die Konstrukteure hoffen jedoch, diese Zahl auf 300 km/h erhöhen zu können. Der Storm-600 soll noch in diesem Sommer auf dem Fluß Newa in St. Petersburg getestet werden. Er könnte letztendlich für Patrouillen, Such- und Rettungseinsätze oder Frachttransporte eingesetzt werden. Außerdem könnte er als mobile Ladeplattform für Luft- und Unterwasserdrohnen dienen.

von Chahl
Im Juli folgt eine Veröffentlichung der University of South
Australia (UniSA), in welcher Prof. Javaan Chahl –
der uns weiter oben schon mit seiner ‚Pandemie-Drohne‘ begegnet ist
– zusammen mit einem internationalen Team über die aktuelle Entwicklung
einer Drohne mit Schlagflügeln berichtet, als deren
Inspirationsquelle die Flugmanöver von Mauerseglern dienten, einem
der schnellsten Vögel der Welt, der für seine unglaubliche Akrobatik
bekannt ist.
Der nur 26 g schwere Ornithopter befindet sich zwar erst im Prototypenstadium, ist aber schon so konzipiert, daß er sich sicher in belebten Umgebungen bewegen kann. Laut dem Team kann er zudem einige Dinge, die herkömmliche Drohnen nicht können: Er kann gleiten, mit sehr wenig Energie schweben und auch bei hohen Geschwindigkeiten schnell zum Stillstand kommen. Der Hauptgrund dafür ist, daß ein Schlagflügel wie ein Flugzeugflügel tragen, wie ein Propeller Schub erzeugen und wie ein Fallschirm bremsen kann.
Obwohl er die gleiche Schubkraft wie ein Propeller erzeugt, schlagen die Flügel des Ornithopters langsam, was ihn in Verbindung mit seinem geringen Gewicht für den Einsatz in der Nähe von Menschen sicherer macht als einen normalen Quadrokopter. Dadurch eignet er sich z.B. gut für Observierungsaufgaben, aber das Team hofft, ihn soweit verbessern zu können, daß er auch für andere Aufgaben geeignet ist. Dazu könnten zählen, ihn mit Nutzlasten zu beladen, ihn Bestäubungsarbeiten in vertikalen Indoor-Farmen durchführen zu lassen oder auch Vögel auf Flughäfen zu verjagen.
Ein anderes Team der UniSA unter der Leitung von Kamil Zuber berichtet
im September über die Entwicklung von Polymerfolien,
deren Farbe sich durch elektrische Spannung ändern läßt. Mit dieser
Technik können Militär-Drohnen ihr Äußeres dem Himmel als Hintergrund
anpassen und dadurch quasi unsichtbar werden.
Das Prinzip dieser Materialien nicht neu und eine ähnliche Technologie wird bereits in Luxusautos, zum Abblenden von Spiegeln und für die Bordfenster des Dreamliner Boeing 787 eingesetzt. Die bisher gebräuchlichen Materialien reagieren jedoch oft zu langsam und erforderen einen hohen Stromverbrauch zum Schalten. Obendrein muß die elektrische Spannung permanent anliegen, um die jeweilige Färbung aufrechtzuerhalten.
Die in Zusammenarbeit mit dem australischen Verteidigungsministerium neu entwickelten Polymerfolien haben hingegen Schaltgeschwindigkeiten im Sekundenbereich und bieten außerdem ein ‚Farbgedächtnis‘, so daß die Spannung kontinuierlich anliegen muß, damit sie ihre eingeschaltete Farbe beibehalten. Außerdem sind normale AA-Batterien ausreichend, um den jeweiligen Farbwechsel zu aktivieren. Das neue Material ist zudem kostengünstig, leicht, langlebig und kann sowohl in starrerer als auch in flexibler Form hergestellt werden.
Für ihre Experimente bringen die Forscher die Polymeroberflächen, die aus fünf bis sechs verschiedenen Materialien bestehen, auf den Rahmen einer kleinen Drohne auf. Die verschiedenen Materialien des Paneels können jeweils 2 – 3 verschiedene Farben erzeugen. Anschließend wird der Prototyp einer Steuerelektronik entwickelt, die den Zustand des Himmels detektiert und dann automatisch die Steuerspannung für das Paneel so anpaßt, daß die gewünschte Farbe erscheint.
Laut Zuber sind die Versuche erfolgreich: Wenn die Chamäleon-Drohne vor einer Wolke vorbeifliegt, wird sie blaß, und wenn sie dann wieder in den blauen Himmel zurückkehrt, wird sie wieder blau.

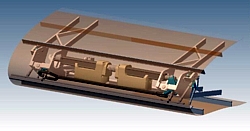
Für Menschen, die den Gedanken an Lieferdrohnen nicht mögen, die mit ihren Propellern gefährlich nahe an ihre Haustür heranschwirren, hat das in Los Angeles ansässige Unternehmen A2Z Drone Delivery ein RDS1 (Rapid Delivery System 1) genanntes, patentiertes System entwickelt, das aus einer ferngesteuerten DJI Matrice 600 Pro Hexakopter-Drohne und einer daran motorisierten Kevlar-Seilrolle besteht, an deren Leinenende sich eine elastische Stofftasche befindet, die eine Nutzlast von bis zu 2 kg aufnehmen kann. Es wird erstmals im Oktober 2020 in den Blogs vorgestellt.

(Detail)
Wenn die Drohne ihr Ziel erreicht, bleibt sie in einer Höhe von rund 46 m (150 Fuß) in der Schwebe und löst die Bremse an ihrer Seilrolle, so daß die Tasche mit der Nutzlast frei durch die Luft fallen kann. Kurz bevor die Tasche auf den Boden trifft, wird die Trommelbremse wieder sanft angezogen, so daß die Nutzlast langsam zum Stillstand kommt. Ermöglicht wird dies durch einen LiDAR-Sensor an der Drohne, der genau mißt, wie weit das Fluggerät vom Boden entfernt ist.
Nachdem der Kunde sein Paket übernommen hat, wird der nun leere Beutel wieder hinauf gezogen. Bei Bedarf kann der Kunde auch eigene Fracht von bis zu 1 kg in den Beutel legen, um diese an eine andere Adresse liefern zu lassen.
Das System soll den Kunden nicht nur den Lärm und die potentielle Gefahr einer niedrig schwebenden Drohne ersparen, sondern auch verhindern, daß die Drohne selbst Zeit und Batterieleistung vergeudet, wenn sie um Hindernisse wie Äste und Stromleitungen manövrieren muß.
Im Vergleich zu Konfigurationen, bei denen der Motor der Spule verwendet wird, um die Nutzlast langsam zum Empfänger abzusenken, wie bei der Wing-Drohne von Google, spart die Freifallkomponente des RDS1 ebenfalls Zeit und Energie.

Im August 2021 wird berichtet, daß die RDS1-Technologie nun in eine speziell entwickelte Multikopter-Drohne integriert wurde – die allerdings noch ziemlich experimentell aussieht. In seiner ursprünglichen Form war RDS1 für den Einbau in einen DJI Matrice 600 Pro Hexacopter vorgesehen. Jetzt ist das System Teil eines neuen Oktokopters. Der A2Z RDSX funktioniert zwar immer noch nach demselben Prinzip, ist aber mit zwei Rollen-/Frachtkisteneinheiten ausgestattet, so daß er zwei 2 kg Lieferungen pro Einsatz durchführen kann.
Die angegebene Batteriereichweite beträgt etwa 15 km, wenn zwei Lasten getragen werden, oder 30 km, bei nur einer. Im Lieferumfang sind zwei Batteriesätze enthalten, die an der Basisstation schnell ausgetauscht werden können. Außerdem können die Propellerarme der Drohne eingeklappt werden, wenn sie nicht in Gebrauch ist, wodurch sie zu einem 0,8 m hohen und 1,3 m breiten Würfel wird.
Ebenfalls im Oktober stellt die University of Colorado Boulder auf
der internationalen Online-Konferenz für intelligente Roboter und Systeme IROS
2020 eine Drohne vor, die den Kugelfisch kopiert,
um sich und andere zu schützen. Wenn sich ein Kugelfisch von anderen
Tieren bedroht fühlt, die ihm zu nahe kommen, vergrößert er sich, indem
er seinen Körper wie einen Ballon aufbläht. Die Drohne namens PufferBot verfolgt
einen ähnlichen Ansatz, damit die wirbelnden Propeller von Multikopter-Drohnen
bei Kollisionen nicht beschädigt werden und Unbeteiligte verletzen.
Im normalen Flug sind eine Reihe von miteinander verbundenen, vorgespannten Kunststoffstäben dicht an den Körper des Quadrokopters gefaltet. Wenn die Näherungssensoren der Drohne jedoch feststellen, daß eine Person oder etwas anderes zu nahe kommt, werden diese Stäbe nach außen gedrückt. Dadurch dehnt sich das Feld zu einem Schild aus, das den Körper des Kopters umgibt und aus einem horizontalen Ring besteht, der über die Propeller hinausgeht, sowie aus zwei sich kreuzenden vertikalen Bögen, die sich über die Oberseite erstrecken.
Indem sich der PufferBot von einem Durchmesser von ungefähr 50 cm auf über 80 cm vergrößert, prallt er einfach an einer Person oder einem anderen Hindernis ab, anstatt sie zu schneiden oder zu beschädigen. Darüber hinaus dient die Entfaltung des Schutzschildes, das etwas mehr als 0,5 kg wiegt, als visuelle Warnung.
Im Oktober 2020 berichten Forscher der Universität
Bristol und des Royal Veterinary College um Shane
P. Windsor und Prof. Richard Bomphrey über
ihre Arbeiten mit einer als Falkenvogel ausgebildeten Schleiereule namens Lily,
die im Labor durch Futterbelohnung dazu gebracht wird, gegen von
Ventilatoren erzeugte vertikale Böen mit verschiedenen
Kräften zu fliegen, von denen die stärksten sogar ihrer Fluggeschwindigkeit
entsprachen.
Das Team setzt eine Kombination aus Hochgeschwindigkeits-Videos, 3D-Oberflächenrekonstruktionsverfahren, numerischer Strömungsdynamik und CT-Scans ein, um zu beobachten, wie die Eule mit den stürmischen Bedingungen klarkommt. Dabei zeigt sich, daß die Eule ihren Kopf und Rumpf erstaunlich stabil hält, wenn sie auf die Windböen trifft, wobei ihre Flügel wie ein natürliches Federungssystem wirken, um die Kräfte in der Luft zu absorbieren.
Nun hoffen die Wissenschaftler, diese Erkenntnisse über die Fähigkeit, mit heftigen und plötzlichen Windveränderungen umzugehen und auch bei starkem Wind stabil zu bleiben, bei der Entwicklung von Kleinflugzeugen anwenden zu können. Der Bericht ist unter dem Titel ,Bird wings act as a suspension system that rejects gusts’ im Netz einsehbar.
Dazu paßt ein im Dezember veröffentlichter Artikel, in dem Forscher
der City University of London und der RWTH
Aachen um Muthukumar Muthuramalingam über
die Entwicklung eines neuen Tragflächentyps berichten, bei dem sie
die Mikrostrukturen an der Vorderkante von Eulenfedern simulieren,
den sogenannten Finlets, die es den Vögeln ermöglichen, ihre Beute
lautlos zu jagen.
Nach der Erfassung von 3D-Geometriedaten typischer Eulenfedern durch hochauflösende Mikro-CT-Scans erstellen die Wissenschaftler ein digitales Modell, das mit Hilfe der numerischen Strömungsmechanik untersucht werden kann. Dabei zeigt sich, daß die Finlets dazu dienen, den Luftstrom umzulenken, so daß er sich kohärenter verhält. Auch Tests mit einer vergrößerten, von den Finlets inspirierten Tragfläche in einem Wassertunnel zeigen, daß diese die über sie laufenden Strömungen umleiten und stabilisieren können.
Die Ergebnisse widersprechen den Erwartungen des Teams, das davon ausging, daß die Krümmung der Finlets tatsächlich Miniaturwirbel erzeugen würde. Stattdessen stellten sie fest, daß sie wie dünne Leitbleche fungieren, die zusammenwirken, um die Strömung über die Spannweite der Flügel zu glätten. Das Team plant nun, eine technische Version des Flügels aufzubauen, mit der die Akustik des Fluges in Windkanaltests weiter untersuchen werden kann. Ziel ist es, diese Art von Mikrostrukturen in die Konstruktion fortschrittlicher Flugzeugflügel einzubauen, um den von ihnen verursachten Lärm zu verringern.
(Grafik)
An dieser Stelle ist der Hinweis angebracht, daß Wissenschaftler des Fraunhofer-Instituts
für Betriebsfestigkeit und Systemzuverlässigkeit LBF in Darmstadt
in Kooperation mit weiteren Fraunhofer-Instituten sowie dem Industriepartner Airbus
DS eine verformbare Flügelvorderkante entwickelt
haben, die sich den jeweils aktuellen aerodynamischen Anforderungen
anpaßt.
Um den Zielkonflikt zwischen der hohen Steifigkeit, die die Hautstruktur der Morphing Leading Edge (MLE) benötigt, um die hohen Luftlasten aufzunehmen, und der hohen Verformbarkeit, die für die Aufgabe notwendig ist, zu lösen, nutzen die Forscher einen Verbundwerkstoff auf Kohlefaserbasis sowie elektromechanische Aktoren. Im Langsamflug erhöht die MLE die Wölbung des Flügels und damit seinen Auftrieb, ohne daß sich dabei, wie bei klassischen Hochauftriebshilfen, Umströmungslärm und Luftwiderstand erzeugende Spalte öffnen.
Das im Rahmen des von der EU geförderten Projekts Clean Sky 2 bis jetzt nur digital entwickelte MLE-System soll bei einer Fortsetzung des Projekts auch in Hardware gebaut werden, um sein Funktionsfähigkeit zu demonstrieren. Mehr als die entsprechende Pressemeldung vom Juli 2020 ist darüber bislang aber nicht zu finden.
Über eine Drohne mit festen Flügeln, bei deren Entwicklung sich die
Forscher der schweizerischen Hochschule EPFL in
Lausanne vom biologischen Vorbild des Habichts haben
inspirieren lassen, wird im November berichtet. Dabei geht es Enrico
Ajanic und seinem Team um die Technik des Raubvogels, seine
Flügel den jeweiligen Erfordernissen entsprechend anzupassen: weit
ausgebreitet für kräftesparenden Gleitflug oder enger am Körper angelegt
für höhere Geschwindigkeit.

Die LisHawk genannte Experimental-Drohne ist insofern kein Starrflügler, da die Tragflächen des Fluggeräts eben nicht starr, sondern verformbar sind. Ansonsten entspricht sie hinsichtlich der Spannweite, Schwanzlänge und Flügelbreite ziemlich genau dem biologischen Vorbild. Neu an der aktuellen Version, von der die Forscher jetzt Videos veröffentlicht haben, sind die ebenfalls beweglichen Schwanzfedern.
Dieser Schwanz der Drohne besteht aus neun Federn, von denen die mittlere fest montiert ist, während zu beiden Seiten jeweils vier Federn aufgefächert werden können. Die aerodynamisch wirksame Fläche kann dadurch um 214 % erweitert werden. Zudem läßt sich der Schwanz auf und ab kippen und seitwärts bewegen. Das Zusammenwirken von verformbaren Flügeln und Schwanzfedern bewirkte beim Langstreckenflug eine Energieersparnis und ermöglichte aggressive Manöver wie das Fliegen enger Kurven auch bei geringen Geschwindigkeiten.
Da der Kontrollaufwand für dieses Design allerdings so hoch ist, daß bei den ferngesteuerten Flugexperimenten das volle Potential nicht ausgeschöpft werden kann, soll die Autonomie der Drohne in naher Zukunft erhöht werden, indem das Kontrollsystem mit KI ausgestattet wird.
Im gleichen Monat veröffentlicht eine Forschergruppe um Sridhar
Ravi an der University of New South Wales (UNSW)
die Ergebnisse einer Untersuchung, deren Schwerpunkt auf der Selbstwahrnehmung
von Hummeln liegt, während sie sich durch die Luft
bewegen. Dabei interessiert sich das Team für die Art und Weise, wie
die Insekten ihre Körperhaltung ändern können, um durch enge Räume
zu fliegen, und zwar auf eine Art und Weise, die ein überragendes Bewußtsein
für ihre Körperform und -größe zeigt.
Den Wissenschaftlern zufolge deuteten frühere Forschungen darauf hin, daß komplexe Prozesse, wie die Wahrnehmung der eigenen Größe, kognitiv gesteuert und nur bei Tieren mit großen Gehirnen vorhanden sind. Die aktuellen Arbeiten zeigen jedoch, daß auch kleine Insekten mit einem noch kleineren Gehirn ihre Körpergröße wahrnehmen und diese Informationen beim Fliegen in einer komplexen Umgebung nutzen können.
Die Forscher machen diese Entdeckung, als sie Hummeln untersuchen, die darauf trainiert worden waren, durch einen Tunnel und durch Lücken unterschiedlicher Breite zu fliegen, einschließlich Räumen, die viel kleiner als ihre Flügelspannweite sind. Durch das, was das Team ‚laterales Spähen‘ nennt, scannen die Insekten den Spalt beim Anflug und erstellen eine umfassende Karte davon, bevor sie ihre Körperausrichtung änderen, um es durch das Loch zu schaffen, anstatt es frontal anzugreifen. Die Forscher vergleichen dies mit der Art und Weise, wie ein Mensch seine Schultern dreht, um durch eine schmale Türöffnung zu passen.
Die Herausforderung besteht nun darin, herauszufinden, wie diese Erkenntnisse auf künftige Robotersysteme angewandt werden können, um deren Leistung zu verbessern.
Ende November 2020 berichten Ingenieure der Stanford
University unter der Leitung von Amin Arbabian über
ein neu entwickeltes System, das eine starke Sonarwelle erzeugen
und die reflektierten Signale von einer luftgestützten Plattform aus
lesen und interpretieren kann. Dies eröffnet die Möglichkeit, daß sonargestützte
Drohnen den Meeresboden kartieren können. Die im Netz einsehbare Studie
trägt den Titel ‚An Airborne Sonar System for Underwater Remote
Sensing and Imaging‘.
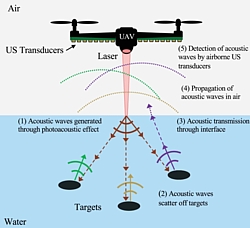
(Prinzipgrafik)
Bei der luftgestützten Methode zur Abbildung von Unterwasserobjekten werden Licht und Schall kombiniert, um die scheinbar unüberwindbare Barriere an der Schnittstelle von Luft und Wasser zu durchbrechen. Radar und LiDAR sind zwar unglaublich schnelle und wirksame Instrumente für die Kartierung und Vermessung der Erdoberfläche, können nicht sagen, was sich unter der Meeresoberfläche befindet, da das Meerwasser einen viel zu großen Teil des Signals absorbiert.
Die effektivste Methode um den Meeresboden zu kartieren, ist nach wie vor das Sonar. Allerdings ist der größte Teil der Ozeane noch immer nicht kartiert, weil Schallwellen bisher nur unter Wasser ausgesandt werden können. Schallwellen, die von der Luft ins Wasser gesendet werden, verlieren bei der Translation mehr als 99,9 % ihrer Energie. Die mageren restlichen 0,1 % erzeugen zwar ein Sonarsignal, aber das verliert weitere 99,9 % seiner Energie, wenn es aus dem Wasser wieder in die Luft aufsteigt.
Das, was einem luftgestützten Sonarsystem bisher am nächsten kommt, sind sogenannte Dipper, Niederfrequenz- und Breitbandsonarsysteme, die an Kabeln von Hubschraubern hängen und wie lärmende Teebeutel in die Tiefe des Meeres eintauchen. Diese Methode ist langsam, teuer und nicht geeignet, um große Gebiete zu erfassen. Das Team aus Stanford hat nun herausgefunden, wie man Sonarsignale von luftgestützten Plattformen aus senden und empfangen kann, ohne das Wasser zu berühren.
Die Idee dahinter lautet: „Wenn man das Licht in der Luft nutzen kann, wo sich das Licht gut ausbreitet, und den Schall im Wasser, wo sich der Schall gut ausbreitet, kann man das Beste aus beiden Welten nutzen“. Und so feuert das Photoacoustic Airborne Sonar System (PASS) einen Laser auf die Wasseroberfläche, dessen Intensität auf eine gewünschte akustische Frequenz abgestimmt ist. Wenn diese Laserenergie absorbiert wird, erzeugt sie im Wasser Ultraschallwellen, die als effektive Sonarwellen wirken können, die von Unterwasserobjekten abprallen, bevor sie an die Oberfläche zurückkehren.
Bei der Rückkehr aus dem Wasser in die Luft wird den Schallwellen zwar fast die gesamte Energie entzogen, aber dieser einseitige Verlust läßt immer noch genug Signal übrig, um von den Wandlern des Fluggeräts ‚gehört‘ zu werden. Sobald das Signal aufgezeichnet ist, wird es von einer Software analysiert, um ein 3D-Bild des untergetauchten Objekts zu erstellen. Das Team testet einen Prototypen des PASS-Geräts in kleinem Maßstab über einer mit stehendem Wasser gefüllten Plastikwanne, wobei das 3D-Bild eines unter der Oberfläche befindlichen Metall-S erzeugt wird.
Die Forschungsarbeiten werden vom US Office of Naval Research und der Advanced Research Projects Agency-Energy (ARPA-E) unterstützt.
Eine interessante technische Entwicklung bildet auch der mechanische
Greifer, mit dem sich kleine Drohnen an Objekten hängen sollen.
Das Motiv dafür ist die notorisch kurze Akkulaufzeit der meisten Quadrokopter-Drohnen.
Wenn diese also irgendwo pausieren könnten, anstatt lange mitten in
der Luft zu schweben, wäre es besser. Was auch schon der Grund für
Entwicklungen wie die Wandlander-Drohne der Stanford University im
Jahr 2010 oder
die S-MAD sowie die Whisper Drohne im Jahr 2017.
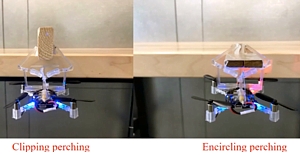
Diesmal sind es Ingenieure der Colorado State University (CSU), die im Dezember darüber berichten, daß sie einen neuen Greifmechanismus entwickelt haben, der auf eine marktübliche Drohne montiert wird. In seiner Mitte befindet sich ein senkrechtes, kolbenartiges Kissen, das mechanisch mit zwei diagonal angehobenen Klapparmen verbunden ist, einem auf jeder Seite. Am oberen Ende jedes Arms befindet sich eine nach innen gerichtete Greiffläche.
Wenn die Drohne gegen die Unterseite eines horizontalen Objekts wie einen Ast, ein Rohr oder ein Geländer fliegt, drückt die Aufprallkraft das Polster nach unten. Dadurch klappen die beiden Arme nach innen, umklammern das Objekt und halten die Drohne in Position. Die Propellermotoren können dann abgeschaltet werden, bis die Drohne wieder fliegen muß.
Je nach Durchmesser des Objekts können es die Arme entweder umschließen oder auf beiden Seiten mit ihren Greifpads greifen. In beiden Fällen ist der Greifvorgang rein mechanisch und erfordert keinen Strom. Um die Arme wieder auseinander zu bewegen, wenn es Zeit ist, sich fallen zu lassen und den Flug fortzusetzen, ist nur eine geringe Energiemenge erforderlich.

Im Dezember 2021 ziehen die Ingenieure der Stanford
University nach, indem sie eine Drohne präsentieren, die von
einem Wanderfalken inspirierte Roboterkrallen besitzt,
um Objekte zu Greifen und sich auf Ästen und anderen Oberflächen niederzulassen
(‚Bird-inspired dynamic grasping and perching in arboreal environments‘).
Das Stereotyped Nature-inspired Aerial Grasper (SNAG) genannte System hat Motoren, die wie Muskeln, und Drähte, die wie Sehnen wirken. Es fängt den Aufprall bei der Landung ab und bewirkt, daß sich die Krallen innerhalb von 20 Millisekunden um die Sitzstange schließen. Ein Ausgleichsalgorithmus stabilisiert den Roboter dann, damit er nicht von der Sitzstange kippt.
Tests in einem Wald zeigen, daß SNAG auf Ästen unterschiedlicher Dicke, Beschaffenheit, Unebenheiten und Ausläufern landen und sich festhalten kann, egal ob diese trocken oder mit Wasser benetzt sind. In anderen Tests zeigt das Team, daß die reaktionsschnellen Klauen auch Gegenstände wie Bohnensäcke und Tennisbälle auffangen können. Ebenso können sie zum Transport von Fracht verwendet werden, indem sie Gegenstände aufheben und absetzen, ohne dabei anhalten zu müssen.
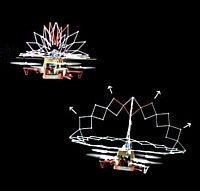
Die jüngste Meldung im Zusammenhang mit neuen Konstruktionstechniken
stammt ebenfalls vom Dezember 2020. Diesmal bilden Käfer das Vorbild
für eine Drohne mit Knautschzone, die Kollisionen schadlos übersteht.
Da flugfähige Käfer überwiegend in Wäldern leben, in denen sich Kollisionen
ihrer Flügel mit Zweigen, Blättern und anderen Hindernissen nicht
immer vermeiden lassen, haben die Ingenieurwissenschaftler Hoang
Vu Phan und Hoon Cheol Park von der Konkuk
University in Südkorea untersucht, wieso die Insekten trotzdem
nur selten abstürzen.
Bei ihren Experimenten mit Samuraikäfern (Allomyrina dichotoma) beobachten sie zunächst die Entfaltung der Hinterflügel, die, solange sie nicht gebraucht werden, wie bei fast allen Käfern unter härteren Deckflügeln verborgen und dadurch geschützt sind. Die Forscher lassen die Käfer dann durch einen Raum fliegen, der so dicht mit senkrecht aufgestellten Stäben präpariert ist, daß es häufig zu Kollisionen mit den Flügeln kommt.
Dabei zeigen es zwei unterschiedliche Reaktionen: Wenn die Kollision in der Mitte der Flügel erfolgt, reagieren die Käfer meistens, indem sie sich mit ihren Beinen an das Hindernis klammern. Berührt hingegen die Spitze des Flügels den Stab, kommen die Käfer gelegentlich kurz ins Taumeln, können aber in der Regel ungehindert weiter fliegen – da die Flügel in diesem Fall entlang der Falzlinien zusammenknicken und den Stoß dadurch abfangen. Um sich wieder voll zu entfalten, benötigen sie knapp vier Millisekunden und damit nur das Drittel eines Flügelschlags.
Inspiriert von diesem Flugverhalten konstruieren Phan und Park einen 17,8 g schweren Roboter, dessen Flügel sich in sieben Millisekunden zusammen oder auseinander falten können. Dies hilft der Drohne, Kollisionen auf ähnliche Weise abzufangen, wie ihr biologisches Vorbild. Die Ablenkung der Flugrichtung (Gierrate) wird dabei um bis zu zwei Drittel reduziert, was nicht nur Abstürze verhindert, sondern auch Flüge durch Lücken erlaubt, die kleiner sind als die Flügelspannweite.
Es gibt aber auch diverse Informationen in Bezug auf neue Verfahren.
So kursieren im März Berichte über Prof. Gregor Kemper an
der Technischen Universität München (TUM), der gemeinsam
mit Prof. Mireille Boutin von der Purdue
University im US-Bundesstaat Indiana statt Kameras Schallwellen einsetzt,
damit eine Drohne die Lage von Wänden und weiteren ebenen Flächen
im Raum orten kann. Technisch ist das unproblematisch, doch für eine
genaue Bestimmung der Flächen muß die Drohne die Echos der jeweils
richtigen Wand zuordnen können – und daraus die genaue Lage berechnen.
Es handelt sich also eher um ein mathematisches Problem.
Als Grundszenario wird ein herkömmlicher Raum mit flachen Wänden, Zimmerdecke und Fußboden gewählt, in dem eine Drohne fliegt, die mit einem Lautsprecher und vier Mikrofonen bestückt ist – bislang allerdings nur auf dem Papier, da die Mathematiker ihren Ansatz zunächst theoretisch beweisen wollen.
Da jedes Mikrofon sehr viele Echos auf nimmt, wird ein Algorithmus entwickelt, der die mathematische Beziehung der Laufzeiten – also die Zeitdifferenz von der Aussendung des Schallimpulses bis zum Empfangen des Echos –, die zu einer einzigen Wand gehören, berücksichtigt und deswegen in der Lage ist, die einzelnen Echos der richtigen Wand zuzuordnen. Anschließend ist es leicht, die Positionen und Neigungen der einzelnen Wände zu berechnen.

mit Ereigniskamera
Im gleichen Monat stellen Forscher der Universität Zürich (UZH)
unter der Leitung von Davide Scaramuzza einen mit
einem neuartigen Kameratyp, einer sogenannten Ereigniskamera,
und mit Algorithmen ausgerüsteten Quadrokopter vor, dessen Reaktionszeit
auf wenige Millisekunden reduziert ist – im Vergleich zu den 20 – 40
Millisekunden, die es normalerweise dauert, bis eine Kamera-Drohne
reagiert. Damit schafft es der UZH-Quadrokopter, einem aus geringer
Distanz geworfenen Ball auszuweichen.
Herkömmliche Videokameras machen regelmäßig Schnappschüsse der gesamten Szenerie, indem sie gleichzeitig alle Pixel belichten. Ein bewegtes Objekt wird dabei jedoch erst dann erkannt, wenn alle Pixel analysiert sind. Ereigniskameras verfügen dagegen über intelligente, unabhängig voneinander arbeitende Pixel: Nur die Pixel, die eine Veränderung der Lichtintensität detektieren, senden sofort Informationen aus, die anderen bleiben stumm. Dies beschleunigt die Verarbeitung enorm.
Im Zuge der Arbeiten, die vom Schweizerischen Nationalfonds finanziert werden, möchten die Forscher das System in Zukunft mit einem noch agileren Quadrokopter testen. Das Ziel ist eine autonome Drohne, die genauso gut navigiert wie ein menschlicher Drohnenpilot.
Im Juni berichtet das Team zudem über die Entwicklung eines neuen Navigationsalgorithmus, der es unbemannten Quadrokoptern ermöglicht, beeindruckende Flugformen zu vollführen. Erreicht wird dies mit einem künstlichen neuronalen Netz, das mit Hilfe einer Flugsimulationssoftware auf akrobatische Manöver trainiert werden konnte. Die Wissenschaftler hoffen, daß dieser Trainingsweg dazu beitragen kann, die Effizienz von Drohnen in Bereichen wie Such- und Rettungseinsätzen zu steigern.
Auch über Drohneneinsätze in der Stratosphäre und außerhalb
der Erde wird in diesem Jahr einiges berichtet.

(Grafik)
Dies beginnt
mit dem im Februar erfolgreich absolvierten Jungfernflug des unbemannten
solar-elektrischen Flugzeugs PHASA-35 (Persistent
High Altitude Solar Aircraft), welches das Potential hat, ein Jahr
lang in Höhen um 20.000 m zu operieren, indem es tagsüber von der Sonne
und nachts von langlebigen Batterien angetrieben wird. Hierfür ist
das aus ultradünnem Kohlefaser-Verbundwerkstoff hergestellte Fluggerät
mit extrem leichten Solarzellen ausgestattet.
Der sowohl für militärischen als auch kommerzielle Anwendungen gedachte Solarflieger mit einer Spannweite von 35 m, der eine dauerhafte und erschwingliche Alternative zu Satelliten bieten soll, war im Rahmen einer Zusammenarbeit zwischen den britischen Firmen BAE Systems und Prismatic Ltd. in nur 20 Monaten entwickelt und gebaut worden.
Ein Modell im Maßstab 1:4 mit dem Namen PHASE-8 absolvierte im Jahr 2017 seinen Erstflug, und 2019 stellte die in Hampshire beheimatete Prismatic zwei Konzeptflugzeuge in Originalgröße her (und wird von der BAE Systems als Tochterunternehmen übernommen).

Die aktuelle Flugerprobung des High Altitude Long Endurance (HALE)-Flugzeugs PHASA-35, die vom britischen Defence Science and Technology Laboratory (DSTL) und der australischen Defence Science and Technology Group (DSTG) gefördert wird, findet auf dem Woomera-Testgelände der Royal Australian Air Force (RAAF) in Südaustralien statt.
Nach weiteren Erprobungen führt das 150 kg schwere Flugzeug, darunter 15 kg Nutzlast, im Oktober 2020 einen Langzeitversuch mit einer Sensornutzlast durch, bei dem es 72 Stunden lang in einer simulierten Umgebung mit rauhen Stratosphärenbedingungen im Einsatz ist. Und nachdem das US-Verteidigungsministerium und andere Bundesbehörden ein stark wachsendes Interesse an dem Flugzeug bekunden, kündigt die BAE Systems im Januar 2021 Pläne für eine Flugdemonstration in den Vereinigten Staaten an.

Im Mai 2021 führt die Prismatic zudem am ATLAS-Flugzentrum (Air Trafic Laboratory for Advanced unmanned Systems) im spanischen Villacarrillo Flugtests mit zwei Versionen der Drohne LASA 5 durch, die als Low Altitude Long Endurance (LALE)-Flugzeuge für eine leise, unauffällige Überwachung und Unterstützung aus niedrigen Flughöhen gedacht sind. Dabei werden neun Flüge mit einer Gesamtflugzeit von 14 Stunden durchgeführt, aufgeteilt auf die LASA V1 und V2. Dazu gehört auch ein 3 Stunden 20 Minuten langer Dauerflug.
Der Hauptunterschied zwischen HALE und LALE ist der Einfluß der Wolken. HALE-Flugzeuge fliegen über den Wolken und haben somit tagsüber eine garantierte Sonnenenergieversorgung. Frühere HALE-Modelle umfassen den Pathfinder und den Helios der NASA (1998); den Odysseus von Aurora Flight Sciences (s. 2008); das ELHASPA des DLR (2011); den Zephyr S und seine Nachfolger von Airbus (s. 2014); den CH-T4 aus China (2017); das HAWK 30 Solar-HAPS bzw. der Sunglider von AeroVironment Inc. (s. 2018); und schließlich der A3 High Altitude Pseudo Satellite der Firma Astigan Ltd. (2019).

(Grafik)
Als Alternative zu den solarbetrieben Höhenplattformen arbeitet das 2014 gegründete
britische Startup Stratospheric Platforms Ltd. (SPL),
dessen größter Anteilseigner seit 2016 die Telekom
ist, an der Entwicklung eines wasserstoffbetriebenen ferngesteuerten
Flugzeugs, das als ‚mobiler Funkmast‘ am Rand der Stratosphäre operieren
und eine sowohl 4G- als auch 5G-Netzabdeckung ermöglichen soll. Laut
SPL hat das geplante Fluggerät eine Spannweite von etwa 60 m, wiegt
aber nur 3,5 Tonnen und kann eine 140
kg schwere Kommunikationsnutzlast tragen.
Die Plattform mit einer Lebensdauer von über zehn Jahren wird von einem Wasserstoff-Brennstoffzellensystem angetrieben, wobei das Höhenflugzeug bis zu 1.200 kg Flüssigwasserstoff transportieren kann. Wie lange dieser Brennstoff reicht, wird allerdings nicht angegeben.

Bei mehreren Flügen mit einem ferngesteuerten (konventionellen) Testflugzeug Anfang Oktober in Bayern, die in einer Höhe von 14 km erfolgen, werden erfolgreich Sprach- und Datenverbindungen in 4G-Qualität aufgebaut, was belegt, daß sich auf diese Art Funklöcher in entlegenen Gebieten schließen lassen. Durch die Flughöhe und die freie Sicht auf den Boden kann das Flugzeug mit speziellen Antennen Funkzellen von bis zu 100 km (andere Quellen: 140 km) Durchmesser versorgen. Der Kunde soll vom Übergang der Verbindung von einem klassischen Mobilfunkmast zu einer fliegenden Antenne nichts bemerken.
Aktuell befindet sich die SPL in Gesprächen für eine neue Finanzierungsrunde. Den ersten Flug der neuen Plattform plant die Firma für Mitte 2022, während das operative Geschäft dann ab 2024 starten soll.
Im September 2021 gehört die Firma zu den 15 Bewerbern, die aus dem Programm für Verkehrsforschung und -innovation zusammen 3 Mio. £ erhalten, um die Regierungsinitiative zur Förderung der emissionsfreien Wasserstofftechnologie für die kommerzielle Luftfahrt voranzutreiben. Dabei soll die SPL ein Flugplatz-Sicherheitszonen-Tools für den Umgang mit Flugzeugen entwickeln, die mit Flüssigwasserstoff betrieben werden. Weitere Schritte in diesem Zusammenhang werde ich im Kapitelteil Wasserstoff dokumentieren (in Arbeit).
Im Juli 2020 startet das Projekt OBeLiSk (Operationelles
Betriebskonzept zur sicheren und effizienten Luftraumintegration von
Stratosphärenplattformen), bei dem ein Team aus Experten der Leichtwerk
Research GmbH, der Unisphere GmbH, der Deutschen Flugsicherung GmbH
(DFS), des Deutschen Wetterdienstes und des Instituts für Flugführung
(IFF) der TU Braunschweig Konzepte, Verfahren und Regeln für den dynamischen
Betrieb von HAPS entwickeln soll.
Die besonderen Flugleistungen der HAPS hinsichtlich Geschwindigkeit, Steig- und Sinkraten sowie die lange Flugdauer erfordern eine sorgfältige und gründliche Flugplanung, bei der insbesondere wechselnde Wetterbedingungen eine kontinuierliche und effiziente Optimierung der Routenplanung während des Fluges erfordern. Im weiteren Projektverlauf werden entsprechende Konzepte und die dazu notwendigen Mensch-Maschine-Schnittstellen prototypisch implementiert und anhand von Demonstratoren validiert.
Das Projekt mit einer Laufzeit bis zum Juli 2024 wird vom Bundesministerium für Wirtschaft und Energie (BMWi) gefördert.

(Grafik)
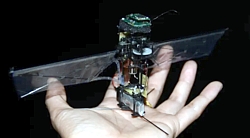
Ein weiteres Flugobjekt für ‚woanders‘ ist der Mars-Hubschrauber der
NASA, über den erstmals im Jahr 2015 berichtet
wurde (s.d.). Im April 2020 meldet die Presse, daß
der Hubschrauber, der an Bord des Rovers Perseverance (Durchhaltevermögen)
im Sommer zu dem roten Planeten aufbrechen und im Februar 2021 dort
landen soll, nun auf den Namen Ingenuity (Einfallsreichtum)
getauft worden sei. Der Vorschlag der Oberstufenschülerin Vaneeza
Rupani aus dem US-Bundesstaat Alabama, der ursprünglich dem
Rover galt, war aus rund 28.000 Einreichungen ausgewählt worden.
Dem gegenwärtig Stand nach wiegt der Hubschrauber knapp 1,8 kg, hat einen Rumpf von der Größe eines Softballs, und seine zwei Rotoren mit Blättern aus Kohlefaser drehen sich mit 3.000 U/m rund zehnmal schneller als bei einem Helikopter auf der Erde, damit er mit der um 99 % dünneren Atmosphäre des Mars klarkommt. Die Ingenieure haben den Hubschrauber so konstruiert, daß er sich selbst warm hält und seine Batterien mittels Solarzellen selbst auflädt.
Navigiert wird der Helikopter mit einer Technologie, die Prof. Stephan Weiss vom Institut für Informationstechnologie der österreichischen Universität Klagenfurt mitentworfen hat. Für seine Dissertation an der ETH Zürich hatte er einen Algorithmus entwickelt, der die Navigation mittels Kamera und ohne GPS-Signal ermöglicht. Als späterer JPL-NASA-Mitarbeiter führte er seine Drohnen-Navigationstechnologie bereits 2013 bei einer Flugdemonstration vor.
In den darauf folgenden Jahren wird die Technologie kontinuierlich weiterentwickelt, und im Jahr 2018 nimmt das Team von Weiss an der analogen Mars-Mission AMADEE-18 in der Wüste Omans teil, wo der Algorithmus unter Mars-ähnlichen Bedingungen erprobt wird.
Die Landesonde mit dem Rover und dem Mars-Helikopter wird Ende Juli 2020 mittels einer Atlas-V-Trägerrakete vom Cape Canaveral aus auf den 470 Mio. km langen Flug zum Mars gestartet, wo sie voraussichtlich Mitte Februar 2021 eintreffen wird. Mars 2020 ist die fünfte Mars-Rover-Mission der NASA.
Da eine Live-Kommunikation zwischen der Erde und dem Mars aufgrund der großen Entfernung nicht möglich ist – die Signallaufzeit beträgt etwa 11 Minuten –, erhält das Fluggerät vor dem Start eine Reihe von Befehlen und wird nach der Landung eigene Entscheidungen über seine Flüge auf den Roten Planeten treffen. Sollte alles glatt gehen und Ingenuity zum ersten Fluggerät werden, das auf einem anderen Planeten fliegt, wird dies noch dokumentiert. Mehr über Ingenuity findet sich in der Übersicht 2021.
(Grafik)
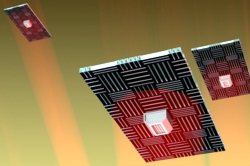
Interessanterweise hatten Wissenschaftler University of Pennsylvania unter
der Leitung von Prof. Igor Bargatin bereits im April 2020 eine
Alternative vorgeschlagen, da der Mars-Helikopter nur ein einziges
Fluggerät ist, das nutzlos wird, wenn es ausfällt. Statt dessen werden
Flotten von winzigen und billigen Nanocardboard Flyers ins
Auge gefaßt, die äußerlich rein gar nichts mit einem üblichen Fluggerät
zu tun haben.
Die kleinen, flachen und rechteckigen Geräte bestehen aus einer Aluminiumoxid-Platte, die von Gruppen schlitzförmiger Mikrokanäle durchzogen ist, die zumeist hohl sind und deren Wände nur wenige Nanometer dick sind. Dies erhöht die Steifigkeit, verhindert, daß sich Risse ausbreiten, und verleiht den Platten eine Wellpappen-ähnliche Riffelung. Außerdem ermöglichen sie ihnen das Fliegen ohne beweglichen Teile zu haben, was korrekt ausgedrückt photophoretische Levitation genannt wird. Das Phänomen einer verdünnten Gasströmung aufgrund des Temperaturgefälles entlang der Kanalwand wird auch als ‚thermisches Kriechen‘ bezeichnet.
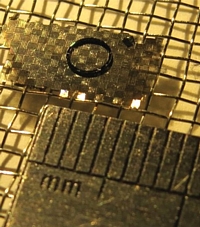
mit Nutzlast
Die Funktion erklärt sich recht einfach: Wenn die Oberseite der Platte durch helles Licht erhitzt wird, bewirkt der Temperaturunterschied zwischen ihr und der schattigen Unterseite, daß Luft durch die offene Oberseite jedes Kanals angesaugt und durch die offene Unterseite wieder ausgestoßen wird. Dadurch entsteht ein Luftpolster unter dem Flyer, das ihn zum Schweben bringt. Die Photophorese, d.h. die durch Licht angetriebene Flüssigkeitsströmung, wurde bisher schon zur Levitation von Feststoffteilchen verwendet, allerdings nur bei Größen von 1 – 20 µm. Als Beispiel wird die Herstellung eines 3D-Displays genannt.
Bargatin und sein Team arbeiten ab 2017 zusammen mit Forschern des Singh Center for Nanotechnology an der Entwicklung des Nanokarton und erreichen schon im Folgejahr ein rekordverdächtiges Verhältnis von Gewicht und Steifigkeit. Ihr im Oktober 2018 veröffentlichter Bericht ist im Netz einsehbar: ‚Nanocardboard as a nanoscale analog of hollow sandwich plates‘. Damit werden architektonisch gestaltete Metamaterialplatten mit einer Dicke von 50 nm möglich, um die photophoretische Levitation im Millimeter- bis Zentimeterbereich zu realisieren.
Jedes der Nanocardboard Flyer wiegt mit ca. einem Drittel Milligramm etwa so viel wie eine Fruchtfliege, wobei die dünne Atmosphäre und die schwache Schwerkraft des Mars es ihnen theoretisch ermöglicht, Nutzlasten zu tragen, die bis zu zehnmal mehr wiegen als sie selbst. Da dies immer noch eine ziemlich niedrige Gewichtsgrenze darstellt, arbeiten die Wissenschaftler auch an der Entwicklung miniaturisierter chemischer Sensoren, die auf den Flyern angebracht werden könnten. Bei ihren Experimenten verwenden sie einen winzigen Silizium-Ring als Nutzlast.
Es könnte sogar möglich sein, sie zu lenken, wenngleich auch nur in Bodennähe. Sobald eines der winzigen Fluggeräte von einem Rover aus gestartet ist, könnte das Fahrzeug den Flyer mit einem Punktlaser verfolgen und ihn drehen, indem es den Laser selektiv auf verschiedene Bereiche der Oberseite der Platte richtet, da die Richtung der aus ihren Kanälen strömenden Luft davon abhängt, welche Teile der Platte erhitzt werden. Mit mehreren unabhängig voneinander gesteuerten Lasern wäre es sogar möglich, daß ein einziger Rover eine ganze Flotte von Flyern steuert.
Terrestrische Anwendungen wären in der Mesosphäre möglich, die von der Dichte her der Marsatmosphäre ziemlich ähnlich ist. Gegenwärtig gibt es nichts, was dort fliegt, da sie für Weltraumsatelliten zu niedrig, für Flugzeuge und Ballons aber zu hoch ist.

Im Dezember informiert die Gaskar Group, ein Softwareentwickler
in Moskau, auf der GITEX international exhibition 2020 in
den VAE über den Beginn der Produktion von vollautonomen Hive-Drohnen
– nachdem das russische Verkehrsministerium im Vormonat seine Bereitschaft
angekündigt hatte, Drohnen im gemeinsamen Luftraum gleichberechtigt
mit bemannten Flugzeugen zuzulassen. Die Entwicklung des Drohnenports
hatte 2019 begonnen, als Nikolay Ryashin die
Firma Hive gegründet hatte.
Das Hive selbst ist ein autonomes Robotersystem, das den kontinuierlichen Betrieb einer Drohne rund um die Uhr gewährleistet, was dadurch geschieht, daß der Austausch der Drohnenbatterien innerhalb einer Minute durch einen speziellen Robotermanipulator erfolgt, ohne auf das Aufladen warten zu müssen. Mit dem Drohnenport wurden bereits Versuchsflüge in einem Kohlebergbaugebiet in der Region Kemerowo bei -20°C durchgeführt, auf einem offenen Feld in Kasan und beim Bau eines medizinischen Clusters in Skolkowo. Der Verkauf beginnt 2021.
Ebenfalls im Dezember 2020 hebt ein ,neues’ solarbetriebenes
Flugzeug zu seinem Jungfernflug ab, das auf dem im Vorjahr erworbenen
geistigen Eigentum der Solar Impulse basiert, die 2015 – 2016 um
die Welt geflogen war. Die aktuelle Entwicklung erfolgte auf Wunsch
der US-Navy, die das 2017 gegründete
spanisch-amerikanische Unternehmen Skydweller Aero Inc. hierzu
mit einem Vertrag in Höhe von 5 Mio. $ unterstützte. Das Unternehmen
hat seinen Hauptsitz in Oklahoma, Büros in der Region Washington D.C.
und eine Flugtestanlage in Albacete, Spanien.
Anderen Quelle zufolge wurde die Skydweller erst im Jahr 2019 nach der Übernahme des Solar Impulse 2-Flugzeugs gegründet, über das ich ausführlich in den Jahresübersichten 2014 und 2016 berichtet habe (s.d.).

Die Spannweite der noch namenlosen Maschine, die zumeist als Skydweller Solar Impulse 2 (SI2) bezeichnet wird, ist mit 72 m genauso groß wie die der originalen Solar Impulse, ebenso die Photovoltaik-Fläche von 270 m2. Über die Kapazität der Batterien gibt es keine Angaben, sie sollen aber bei Bedarf durch Wasserstoff-Brennstoffzellen ergänzt werden. Je nach Breitengrad wird die Maschine 30 – 90 Tage in einer Höhe von 9.000 – 14.000 Metern fliegen können.
Während einer zweieinhalbstündigen Flugdemonstration mit Piloten an Bord im April 2021 kann das Skydweller-Entwicklungsteam eine erste Validierung der neuen Flug-Hardware der stark modifizierten Solar Impulse 2 und der Fähigkeit des Autopiloten, die Systeme zur Steuerung, Betätigung und Sensorik des Flugzeugs zu initiieren und zu verwalten, abschließen. Als Nächstes soll nun der autonome Flug getestet werden, anschließend der autonome Start, und schließlich die autonome Landung. Danach sind Marathon-Flüge über 90 Tage geplant.
Im September verbucht das Unternehmen eine Investition in Höhe von rund 4 Mio. $ von dem Risikokapitalfond NevaSgr der Intesa Sanpaolo Group. Die Investition ist Teil der Serie-A-Runde von Skydweller in Höhe von 32 Mio. $ unter der Leitung des italienischen Luft-, Raumfahrt- und Rüstungskonzerns Leonardo S.p.A., der Marlinspike Capital und der Advection Growth Capital. Zudem geht die Skydweller eine Partnerschaft mit Palantir Technologies ein, um deren Foundry-Analyseplattform zur Verarbeitung von Informationen im großen Maßstab und an Bord des Flugzeugs zu nutzen.
Im Folgemonat wird eine Reihe von Flugtests der autonomen Flugzeugsteuerung und des Wegpunktnavigationssystems abgeschlossen. Hierfür waren neue Kommunikationsverbindungen und verschiedene Sensoren für automatische Starts und Landungen installiert und bewertet worden. Die Tests sollen in den nächsten Monaten fortgesetzt werden, während das Unternehmen die Umwandlung des Flugzeugs in ein unbemanntes Luftfahrtsystem fortsetzt. Sobald der Flug vom Start bis zur Landung ohne Zutun des Piloten absolviert werden kann, wird das Cockpit entfernt, um eine vollständig autonome Flugtestkampagne zu beginnen.
Im April 2022 erhält die Skydweller U.S. Inc., eine Tochtergesellschaft der Skydweller Aero Inc., einen Vertrag im Wert von 14 Mio. $ von der Defense Innovation Unit (DIU) in Zusammenarbeit mit der U.S. Navy, um die Entwicklung des Solarflugzeugs auf militärischem Niveau weiter zu fördern.
Weiter mit den Elektro- und Solarfluggeräten 2020 ...