Buch der Synergie
| Blättern |
 TEIL C
TEIL C
Elektro- und SolarfluggerÄte
2021 (B)
Als Teil der Plattform ‚Port of the Future‘, mit der neue Innovationen
in der Hafenumgebung eingeführt werden sollen, testet der Hafen
Antwerpen in Zusammenarbeit mit der Europäischen Agentur für
die Sicherheit des Seeverkehrs (EMSA) ab dem Januar 2021 den
Einsatz von Drohnen im Hafengebiet, um sich schneller einen Überblick
über die Situation verschaffen zu können.
Das selbständig agierende Fluggerät übernimmt dabei zahlreiche Aufgaben in den Bereichen Kontrolle und Inspektion. Zudem wird das Bildmaterial von der Universität Antwerpen zur Entwicklung von Algorithmen genutzt, die künftig beispielsweise Ölvorfälle automatisch erkennen können. Der Hafen Antwerpen, Europas zweitgrößter Seehafen, hat bereits 2015 mit der Transformation zum Smart Hub begonnen.

FAR
Eine Erntehelfer-Drohne, die im Publicity erlangt,
wird von der israelischen Firma Tevel
Aerobotics Technologies mit Hauptsitz in Tel Aviv (o. Gedera)
und Niederlassungen in Italien und den USA entwickelt. Konkret handelt
es sich um ein System kleiner, angebundener Quadrokopter, die Obstbäume abernten.
Die über einen Draht mit Energie versorgten Flugroboter pflücken die
Früchte sanft, um keine Druckstellen oder andere Schäden zu verursachen
– anfangs mit einem Unterdruck-Sauger, später mit einem Greifer – und
lassen sie dann auf ein Sammelgerät fallen, wobei fast keine Früchte
auf den Bäumen zurückbleiben.
Das im Oktober 2016 von Yaniv Maor gegründete Unternehmen hatte bereits im Januar 2017 in einer Seed-Finanzierungsrunde 1,4 Mio. $ erhalten, zu denen im April 2019 in einer Finanzierungsrunde A zusätzliche 10 Mio. $ von Maverick Ventures Israel und OurCrowd hinzukommen. Eine Runde B im Januar 2021 bringt weitere 20 Mio. $ von den Investoren AgFunder, OurCrowd, Kubota Corp., Maverick Ventures Israel und Hubei Forbon Technology, gefolgt von 740.000 $ im August von Club degli Investitori. Das Unternehmen hat außerdem einen Zuschuss von 2,5 Mio. $ von der israelischen Innovationsbehörde erhalten.

(mit Greifer)
Die Lösung mit dem Namen Flying Autonomous Robot (FAR) sieht ein wenig aus wie eine Maschine aus Krieg der Welten oder Doctor Who. Der mobile Schwarm von Drohnen, die jeweils mit einem langen Arm und KI-gesteuerten Sensoren und Kameras ausgestattet sind, hat eine hohe Beweglichkeit, da die Drohnen mit sechs Freiheitsgraden manövrieren können. Für die Behauptung, daß das System sogar Aufgaben wie das Beschneiden und Ausdünnen der Bäume übernehmen kann, gibt es bislang allerdings keinen Beleg.
Ein Vorteil der KI-Steuerung ist, daß sie der Drohne erlaubt, nicht nur festzustellen, ob ein Stück Obst zum Pflücken bereit ist, sondern auch zu wissen, wo dieses abgeworfen werden soll, indem QR-Codes zur Zielbestimmung verwendet werden, damit die Maschine alle gleichartigen Früchte in einen einzigen Behälter sammeln kann.
Die Firma kommt erstmals im Zuge der beträchtlichen Finanzierung im Januar 2021 in die internationale Presse. Die Tevel will dies Mittel nun nutzen, um die Produktvalidierung abzuschließen, mit der Produktion zu beginnen und bis Ende des Jahres den kommerziellen Dienst zu starten. Von der anfangs angedachten Lösung mit einem Roboterarm war man übrigens schnell wieder angekommen, weil die Bäume oft zu dicht und zu hoch sind.

In einem im Dezember veröffentlichten Video wird der seit Mitte des Jahres gemeinsam mit der italienischen Rivoira durchgeführte erste kommerzielle Feldversuch gezeigt, bei dem ein 2-Drohnen-System Äpfel pflückt – zwar langsamer als ein Mensch, dafür braucht es aber keine Pause und kann auch die ganze Nacht durcharbeiten. Der Firma zufolge arbeiten die Software und die Hardware fünf Wochen lang ununterbrochen ohne technische Probleme oder Ausfälle.
Die Tevel bietet sich derzeit als Dienstleister an, d.h. ihr Team pflückt mit der Ausrüstung die Früchte für die Landwirte. Darüber hinaus besten bereits Kooperationen mit zwei Unternehmen in den USA und Europa. Als nächstes ist die Anpassung des Systems geplant, um im kommenden Jahr mit demselben Kunden auch Pfirsiche, Nektarinen und Pflaumen zu ernten, und dies nicht nur für einige Wochen, sondern für zwei ganze Saisons. Die Firma hat eigenen Angaben zufolge etwa 20 Roboter, plant für das nächste Jahr aber Hunderte davon in Betrieb zu nehmen.
Auf der 2023 World Ag Expo (WAE 2023) Anfang Februar in Tulare, Kalifornien, kündigt die Tevel eine Zusammenarbeit mit der US-Firma S&S Metal Fabrication zur Herstellung einer etwa 2,4 m breiten und 7,5 m langen automatisierten Ernteplattform an, die über ein weiches Förderband in der Mitte des Fahrzeugs verfügt, das die Früchte sanft zu Lagerbehältern transportiert, die dann hinter dem autonomen Fahrzeug abgesetzt werden, während es die Reihen der Obstplantage abfährt.
Ebenfalls im Januar 2021 startet mit einer Laufzeit
von vier Jahren das EU-Projekt I-Seed, dessen Ziel es
ist, intelligente Roboter zu entwickeln, die sich am und im Boden verteilen,
um Boden- und Klimaparameter zu überwachen. Das Projekt
erhält aus dem FET Proactive-Programm der EU Fördermittel in Höhe von
knapp 4 Mio. €, wird von fünf europäischen Partnern durchgeführt und
vom Istituto Italiano di Tecnologia (IIT) koordiniert. Deutscher Partner
ist das INM – Leibniz-Institut für Neue Materialien in Saarbrücken.
Die Fähigkeit, ihre Samen optimal in den Boden zu bringen, ist für das Überleben von Pflanzen essentiell. Um die Roboter zu entwickeln, die das Verhalten von Pflanzensamen nachahmen, lassen sich die Forschenden von speziellen Pflanzensamen inspirieren, die fliegend oder bohrend ihr Ziel erreichen, z.B. die Samen von Ahorn oder Reiherschnabel. Die I-Seed-Roboter genannten intelligenten Samen sollen Boden- und Klimaparameter überwachen, wie das Vorhandensein von Schadstoffen, Feuchtigkeit, CO2-Gehalt, Temperatur und Wasserqualität.
Hauptziel des Projekts sei es, zwei Arten von biologisch abbaubaren weichen Robotern mit unterschiedlichen Eigenschaften zu entwickeln, die sich nach erfolgter Analyse von selbst zersetzen: I-Seed ERO soll die Form eines Korkenziehers erhalten und durch Bewegung in den Boden eindringen, während I-Seed SAM so konzipiert wird, daß er fliegt und an der Bodenoberfläche arbeitet.
Das Projekt wird hier erwähnt, weil zum Auslesen der Bodendaten aus den zahlreichen I-Seeds Drohnen zum Einsatz kommen. Diese regen diedie Sensor-Materialien in den intelligenten Samen mit Laserlicht zum Leuchten an, genauer zur Fluoreszenz, deren Lichtsignale von den im Boden vorliegenden Schadstoffen oder Umweltbedingungen abhängen. Nachdem die Drohnen diese Lichtsignale empfangen haben, werden sie zeitnah ausgewertet und liefern so verläßliche Daten zur Bodenqualität.
Mit Hilfe ihres Lidar-Systems zur optischen Abstandsmessung können die Drohnen die Samen über größere Distanzen aufspüren, wodurch sich die I-Seed-Roboter auch in geographischen Gebieten einsetzen lassen, in denen derzeit keine Umweltüberwachung vorhanden ist.
Ein ganz besonderes Einsatzgebiet befindet sich gar nicht auf unserem
Planeten, weshalb diesem auch etwas mehr Raum gewidmet wird. Denn Mitte
Februar 2021 landet der NASA-Rover Perseverance (Percy)
auf einem ausgetrockneten See namens Jezero Crater auf dem Mars.
Und bevor sich das Gefährt auf die Suche nach Spuren vergangenem Lebens
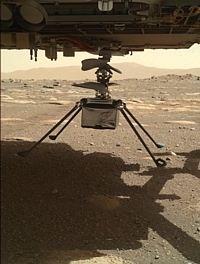
macht, setzt es den Helikopter Ingenuity (Ginny) auf
der Oberfläche ab. Der würfelförmige Mini-Hubschrauber wird damit das
erste Fluggerät, das selbständig auf einem außerirdischen Himmelskörper
fliegt. Über die (irdische) Testversion hatte ich bereits in der Übersicht 2015 berichtet
(s.d.).

(Grafik)
Der Ingenuity wiegt 1,8 km (auf dem Mars: 680 g), ist 49 cm groß, hat vier 40 cm lange Landebeine und besitzt zwei Rotoren mit einer Spannweite von 1,2 m, die übereinander sitzen. Diese Bauweise wird gewählt, damit der Helikopter auf dem Ende Juli 2020 begonnenen Weg vom Weltraumbahnhof Cape Canaveral bis zum Mars, auf eine ziemlich komplizierte Weise zusammengeklappt, unter dem Rover plaziert werden kann, wo es nur wenig Platz gibt. Die Kohlenstoffaser-Propeller drehen sich mit 2.537 U/m, und damit um ein mehrfaches schneller als bei einem irdischen Hubschrauber, da die Marsatmosphäre nur 1 % der Dichte der Erdatmosphäre hat.
Als Nutzlast gibt es zwei Kameras, eine fürs Navigieren und eine, um Farbfotos und stereoskopische Bilder aufzunehmen. Ein wissenschaftliches Ziel, außer zu zeigen, daß Fliegen auf dem Mars möglich ist, hat die Mission nicht. Da die Übertragung von Daten vom Mars auf die Erde rund 20 Minuten dauert, wird der Hubschrauber nicht ferngesteuert, sondern fliegt selbständig, wozu mehrere Computer dienen. Die Steuerung erfolgt mit den Rotorblättern, die alle vier im Flug leicht auf- und abkippen können. Die Flughöhe beträgt bis zu 5 m, die Reichweite bis zu 300 m.
Um seine sechs Lithium-Ionen-Akkus wieder aufladen zu können, ist der Ingenuity oberhalb der Rotoren mit einem kleinen Paneel aus metamorphen Vierfach-Solarzellen ausgestattet, die speziell auf das Marsspektrum abgestimmt sind. Ein großer Teil der gewonnenen Energie wird benötigt, um das Fluggerät während der marsianischen Nachttemperaturen von minus 90°C aufzuwärmen. Der Helikopter benötigt eine Temperatur von minus 5°C, um seine elektrischen Komponenten vor Frostschäden zu schützen.
Ingenuity
Nach den speziellen Vorbereitungen, wie das Absetzen und Ausklappen der Beine und Flügel, die rund zwei Wochen dauern, übersteht Ingenuity auch seine erste Nacht, in der er nicht mehr an dem Rover Perseverance hängt und mit dessen Strom versorgt wird. Da es bei einem Test der Rotoren aber Probleme damit gibt, den Flugcomputer in den Flugmodus zu bekommen, wird der zunächst für den 8., dann für den 11. und schließlich für den 14. April angesetzte Flug verschoben.
Nach Lösung des Problems, das auf einen Fehler in der Sequenz der Steuerungsbefehle zurückgeführt werden kann, sowie eines erneuten Tests, der diesmal erfolgreich verläuft, absolviert die Forschungsdrohne, deren Entwicklung 85 Mio. $ gekostet hat, am 19. April 2021 ihren historischen Erstflug über die Oberfläche des Mars. Dabei steigt sie auf eine Höhe von etwa 3 m, wo sie für etwa dreißig Sekunden auf der Stelle fliegt. Der Rover Perseverance beobachtet und fotografiert den Flug aus einem Sicherheitsabstand von rund 70 m.
Als nächstes will die NASA, wie ursprünglich geplant, bis zu vier weitere Flüge in verschiedenen Schwierigkeitsstufen innerhalb von 30 Tagen absolvieren. Tatsächlich erfolgt am 22. April der zweite Flug, bei dem erstmals Farbfotos aufgenommen werden. Der Flug dauert 52 Sekunden, wobei Ingenuity eine Höhe von 4 m erreicht und sich darüber hinaus 2 m zur Seite und wieder zurück bewegt.
Im Laufe des Monats werden der 3. und 4. Flug durchgeführt. Beim seinem dritten Flug, von dem die NASA ein 3D-Video veröffentlicht, erreicht der Helikopter eine Spitzengeschwindigkeit von 7 km/h, fliegt 80 Sekunden lang und legt dabei 100 m in einen Rundkurs zurück. Beim vierten Versuch hebt er aber nicht ab. Schuld ist das selbe Softwareproblem, das schon vor dem ersten Flug für eine Verzögerung gesorgt hatte.

(2. Flug)
Im zweiten Anlauf, einen Tag später, schafft Ingenuity auch seinen vierten Flug (117 Sekunden, 270 m Rundkurs), von dem eine Mono-Tonaufnahme gibt, gefolgt vom fünften Flug Anfang Mai (140 s, Flughöhe 10 m, 202 m Gesamtstrecke). Es ist das erste Mal, daß ein Fluggerät ein neues Ziel auf einem anderen Planeten ansteuert. Darüber hinaus wurde der neue Landeplatz anhand der Bilder ausgewählt, die Ingenuity bei früheren Flügen aufgenommen hatte.
amit ist die geplante Demonstrationsphase eigentlich beendet, und der Rover Perseverance, der mehr als einen Monat lang vor allem als Relais und Unterstützer für den Helikopter tätig war, soll sich nun seiner eigentlichen Mission zuwenden und Ingenuity zurücklassen.
Aufgrund des durchschlagenden Erfolgs verlängert die NASA jedoch den Einsatz zunächst um weitere 30 Tage. Der Helikopter, der sich weiterhin in einem ausgezeichneten Zustand befindet, soll nun als Kundschafter neben dem Rover herfliegen. Dieser beginnt jetzt seinen langen Weg zu einem mutmaßlich ausgetrockneten Flußbett, wo er nach möglichen Spuren von ehemaligem Leben suchen wird. Später wird die Mission erneut verlängert, außerdem erhält das Fluggerät nehrere Software-Updates, um weitere und höhere Flüge zu ermöglichen.
Tatsächlich finden bis August 2022 insgesamt 29 Flüge statt, deren Details sich z.B. auf Wikipedia finden lassen. Zusammengerechnet beträgt die geflogene Strecke 7,17 km – in einer Gesamtzeit von gut 55 Minuten. Herüberzuheben sind dabei der 10. Flug Mitte Juli, bei dem der Mini-Helikopter in eine Rekordhöhe von 12 m aufsteigt, sowie der 12. Flug einen Monat später, der mit fast 170 Sekunden der Längste ist. Vom 13. Flug Anfang September 2021 wird eine Videoaufnahme veröffentlicht, die Perseverance aus 300 m Entfernung macht. Und in der 21. Etappe wird mit einer Strecke von 500 m der bisher längste Flug absolviert.
Im April 2022 fotografiert Ingenuity die Abdeckung und den Fallschirm, die die Landung auf dem Mars ermöglicht hatten - und legt bei seinem 25. Flug eine neue Rekordstrecke von 700 m zurück. Anfang Mai verliert der kleine Helikopter vorrübergehend die Verbindung zu seinem Rover und damit zur Erde, vermutlich aufgrund der Zunahme von Staub in der Mars-Atmosphäre, was das Nachladen der Batterien erheblich erschwert. Nach dem 29. Flug wird Ingenuity an einem Standort überwintern, wo er in den nächsten 4 – 6 Monaten eine gute Funkverbindung zum Rover Perseverance wird halten können, auch ohne dabei abzuheben.

auf dem Mars
Mitte April 2023 erreicht der Ingenuity Mars Helicopter einen neuen Meilenstein mit seinen 50. Flug, was zehnmal mehr ist, als eigentlich geplant. Bei dem historischen Einsatz fliegt das kleine Gerät in zwei Minuten und 25 Sekunden 322,2 m weit und stellt mit einer Flughöhe von 18 m über der Marsoberfläche auch einen neuen Höhenrekord auf.
Insgesamt hat der Hubschrauber während der 50 Flüge eine Gesamtflugzeit von ca. 90 Minuten erreicht und dabei mehr als 11,6 km zurückgelegt. Jetzt bewegen sich Ingenuity und sein Begleiter, der Perseverance-Rover, in einer Region des Jezero-Kraters, die als Fall River Pass bekannt ist und wegen ihrem zerklüfteten Terrain voller Sanddünen, Geröll und Felsen als gefährlich gilt. Und tatsächlich unterbricht das hügelige Gelände die Kommunikation zwischen Ingenuity und Perseverance ab Mitte April für 63 Tage.
Ende Juni kann die Verbindung mit der Missionskontrolle wiederhergestellt werden, womit auch der 52. Flug offiziell als Erfolg verbucht wird, bei dem während 139 Sekunden eine Strecke von 363 m zurückgelegt wird. Um sicherzustellen, daß Ingenuity für weitere Flüge fit ist, führt das NASA-Team einen Gesundheitscheck des Hubschraubers durch.

Ingenuity
Für die nächste Generation von Mars-Hubschraubern testet das Jet Propulsion Laboratory (JPL) im September einen neuen Rotor, dessen effizientere Kohlefaser-Rotorblätter 10 cm länger sind als die von Ingenuity und eine höhere Festigkeit und ein anderes Design haben, um größere und leistungsfähigere Marshubschrauber zu ermöglichen. Diese Blätter werden auf bis zu 3.500 U/m beschleunigt - bei Ingenuity auf dem Mars sind es 2.537 U/m -, womit die Blattspitzen nahezu Überschallgeschwindigkeit erreichen (Mach 0,95). Die Herausforderung besteht darin, daß die hierbei durch Vibrationen ausgelösten Turbulenzen schnell außer Kontrolle geraten können.
Im Dezember übergibt die NASA dem Smithsonian National Air and Space Museum den Prototyp des Ingenuity Mars Helicopters in Originalgröße.
Mitte Januar 2024 werden die Rotorblätter von Ingenuity bei der Landung während des 72. Fluges beschädigt, wodurch der Hubschrauber dauerhaft am Boden verbleibt. Auf den zur Erde geschickten Bildern ist zu erkennen, daß er zwar aufrecht steht, doch ein oder mehrere Rotorblätter fehlen oder sind so beschädigt, daß er er nicht mehr fliegen kann. Immerhin besteht die Kommunikation mit dem Kontrollzentrum auf der Erde weiter.
Eine Woche später gibt die NASA offiziell das Ende der Mission bekannt - nachdem Ingenuity in fast drei Jahren 72 Flüge absolviert hat, wobei er in insgesamt zwei Stunden, acht Minuten und 48 Sekunden geflogen ist und mehr als 17 km zurückgelegt hat. Außerdem hat er eine Höhe von 24 m erreicht und mit einer Höchstgeschwindigkeit von 10 m/s einen Geschwindigkeitsrekord aufgestellt.

(Grafik)
Ein zukünftiges Folgeprojekt könnte der im März 2022 von AeroVironment vorgestellte neue Mars-Hubschrauber mit einer Nutzlast von 280 g sein, dessen selbstfahrendes Fahrwerk und sein 90 g schwerer Manipulatorarm mit einem Zweifingergreifer den Einsatz zum Sammeln von Proben erlaubt. Vom Aufbau her sieht er seinem Vorläufer sehr ähnlich.
Bei einem weiteren Nachfolger von Ingenuity arbeiten die Ingenieure von AeroVironment mit Kollegen des Jet Propulsion Laboratory (JPL) und des Ames Research Center der NASA zusammen. Der Mars Science Helicopter (MSH) ist als Hexakopter mit einer Masse von etwa 30 kg angedacht, der bis zu 5 kg wissenschaftliche Nutzlast tragen und bis zu 10 km pro Flug fliegen soll, und das bei Geschwindigkeiten von bis zu 100 km/h.

(Grafik)
Ein drittes Projekt trägt den Namen Mars Aerial and Ground Global Intelligent Explorer (MAGGIE) und ist ein kompaktes Starrflügler-Flugzeug, das bei den NIAC-Auswahlen 2024 vorgeschlagen wurde. Es wird mit Solarenergie betrieben und kann ohne Kippmechanismen oder separate Auftriebsrotoren senkrecht starten und landen, was durch die Technologie des abgelenkten Windschattens (deflected-slipstream technology) der Firma CoFlow Jet (CFJ) ermöglicht wird.
Die Reichweite von MAGGIE während ihrer atmosphärischen und geophysikalischen Untersuchungen soll mit einer voll aufgeladenen Batterie 179 km in einer Höhe von 1.000 m betragen, womit die erwartete Gesamtreichweite pro Marsjahr 16.048 km beträgt. Allerdings ist die gesamte Mars-Sample-Return-Mission derzeit auf Eis gelegt, da weitere Überprüfungen anstehen.
In diesem Zusammenhang sei auch auf die Veröffentlichung der NASA ,A Study of Past, Present, and Future Mars Rotorcraft’ vom Januar 2021 hingewiesen, die im Netz einsehbar ist.
Forscher des Harbin Institute of Technology in China schlagen derweil als Alternative zu Ingenuitys koaxialer Architektur die Verwendung eines faltbaren Quadrokopters für den Einsatz auf dem Mars vor, der im Zuge der für 2028 anvisierten Tianwen-3-Probenrückführungsmission dorthin gelangen soll.
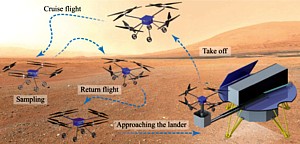
(Grafik)
In der im Juni 2023 veröffentlichten Studie ,Conceptual design and aerodynamic analysis of a Mars octocopter for sample collection’ sowie der Studie ,A Mars quadcopter capable of autonomous flight and sample collection: Structure and avionics’ vom Januar 2024 beschreibt das Team die angedachte Struktur. Es wird davon ausgegangen, daß der MarsBird-VII genannte Hubschrauber mittels vier Rotoren in der Lage sein wird, in einem Radius von 500 m um den Lander herum Marsgestein mit einer Masse von 100 g und einem Durchmesser von etwa 40 mm einzusammeln.
Die Proben würden von einem an der Flugdrohne befestigten Roboterarm eingesammelt und zum Lander zurückgebracht werden, der sie mit seiner Klaue in ein Raumfahrzeug hebt, das dann bis zu 500 g Material in die Umlaufbahn bringt und an das Rückholfahrzeug übergibt, welches schließlich wieder auf der Erde landet, möglicherweise Mitte 2031. Der MarsBird-VII ist bislang aber nur ein Konzept.
Auch woanders wird auch an Alternativen gearbeitet, wie im Juni 2022 zu erfahren ist. Demnach hat ein Team der University of Arizona um Prof. Sergey Shkarayev und Adrien Bouskela sowie den Planetenforscher Alexandre Kling von der NASA das Konzept für einen autonomen Segelgleiter entwickelt, um mehr über die untere Atmosphäre und die Geologie des Roten Planeten zu erfahren. Der Gleiter hat eine Spannweite von 3,30 m, besteht aus einem ultraleichten Material, wodurch er nur 5 kg wiegt, und ist mit einem automatischen Flugkontrollsystem, Kameras sowie Umwelt- und Beschleunigungssensoren ausgestattet.

(Grafik)
Im Gegensatz zu einem Hubschrauber wie Ingenuity kann der durch die Nutzung statischer Aufwinde sowie dynamischer Flugmanöver in der Luft bleiben, auch wenn die marsianische Atmosphäre 100-mal dünner ist als die irdische. Die Forscher gehen davon aus, daß in den Schluchten und an den Vulkanhängen des Mars regelmäßig thermischen Aufwinde auftreten, die genutzt werden können.
Eine Besonderheit des Gleiters ist, daß er sich zusammenfalten läßt, und dann kaum größer ist als ein Telefonbuch. Dadurch könnte er in einem CubeSat als sekundäre Nutzlast gemeinsam mit einer größeren Sonde zu seinem Einsatzort gelangen, wo er sich nach dem Abwurf in der Marsatmosphäre entfaltet.
Als nächstes sind Praxistests in der Erdatmosphäre mit einem Gleiter-Prototypen vorgesehen, die in einer Höhe von 15.000 m erfolgen sollen, wo die Atmosphäre ähnlich dünn ist wie die des Mars. Ein echter Marsgleiter soll inklusive Begleitkosten etwa 100 Mio. $ kosten, bis er seine Flüge vor Ort durchführen kann. Der im Netz einsehbare Bericht trägt den Titel ‚Mars Exploration Using Sailplanes‘.
Ebenfalls angedacht wird die Möglichkeit, das oder die Segelflugzeuge mit einem Ballon oder einem Luftschiff in die Atmosphäre des Mars zu befördern. Dies würde den Sinkflug der Segelflugzeuge verlangsamen und es ihnen ermöglichen, erst bei optimalen Windverhältnissen oder bei Annäherung an ein Gebiet von hohem Interesse zu starten. Die Segelflugzeuge könnten nach einem Flug sogar wieder an den Ballon oder das Luftschiff andocken und später weitere Missionen absolvieren.
Der Gleiter wirkt allerdings wie eine Neuauflage des Prandtl-m, der bereits 2015 von Technikern der NASA entwickelt worden war – ohne daß dies hier angegeben wird.
In diesem Zusammenhang sei noch auf ein weiteres Konzept hingewiesen:
Im Juli 2021 veröffentlicht die NASA eine im Netz
einsehbare Studie unter dem Titel ‚Science Goals and Objectives for
the Dragonfly Titan Rotorcraft Relocatable Lander‘, die mit der 2019 beschlossenen
Mission Dragonfly zum Saturnmond Titan zusammenhängt.

(Grafik)
Für die Suche nach Leben, die ganz oben auf der Liste der wissenschaftlichen Ziele steht, wird die Mission einen fliegenden Rover umfassen, der auf der Oberfläche herumhüpft – eine größere Version der Ingenuity-Drohne. Der unbemannte, nuklearbetriebene Rover wird keine Räder haben, sondern mit seinen Rotoren durch die Titanatmosphäre fliegen und dabei nach organischen Molekülen suchen, darunter auch nach den Bausteinen für vergangenes oder gegenwärtiges Leben. Dabei muß er der Methanatmosphäre des Mondes standhalten, die viermal so dicht ist wie die der Erde und eine Temperatur von minus 179°C erreicht.
Da Dragonfly erst 2026 (später: im Juni 2027) starten und 2034 auf dem Titan ankommen soll, befindet sich das Projekt noch in der Entwurfsphase. Diese sieht gegenwärtig ein Fluggerät in der Größe des Marsrovers Curiosity vor (3,1 × 2,7 × 2,1 m), das auf zwei Landekufen steht und mit acht ein Meter großen Rotoren ausgestattet ist. Diese werden von Batterien angetrieben, die von einem radio-thermischen Generator (RTG) geladen werden. Er wird mit einer Geschwindigkeit von bis zu 36 km/h in einer Höhe von bis zu 4.000 m fliegen können, und soll eine Reihe von Flügen absolvieren, die bis zu 8 km lang sein werden.
Im Oktober 2022 werden weitere Details über den geplanten Einsatz bekannt. Demnach soll der Dragonfly-Drehflügler in der Dünenregion Shangri-La in der Nähe des 80 km breiten Kraters Selk landen. Bei der Region handelt es sich im Wesentlichen um ein Flickenteppich aus Eis und Sanddünen. Die Beschreibung basiert auf einer Analyse von Radarfotos des Gebiets, die die NASA-Raumsonde Cassini während ihrer 13-jährigen Erforschung des Saturnsystems zwischen 2004 und 2017 gesammelt hat. Da die Dragonfly bei jeder Fahrt in einer halben Stunde etwa 16 km zurücklegen kann, soll sie im Laufe der zweijährigen Mission ein Gebiet mit einer Breite von Hunderten von Kilometern erkunden.
Im November 2023 wird bekannt, daß die NASA den Start ihrer Dragonfly-Mission zum Titan auf den Juli 2028 verschoben hat, wobei die formelle Bestätigung der Mission nach einer Budgetüberprüfung Mitte 2024 Jahr erwartet wird. Angesichts der Verzögerung, die auf die unsichere und wechselnde Finanzierung der Abteilung für Planetenforschung zurückzuführen ist, wird Dragonfly frühestens 2035 auf dem Titan landen. Eine aktuelle Kostenschätzung für die Mission gibt es nicht, es wird aber eingeräumt, daß sie die anfänglichen Erwartungen übersteigt.
Das Dragonfly-Team hat derweil bedeutende Fortschritte gemacht. Anfang des Jahres hat die Mission die vorläufige Entwurfsprüfung bestanden, worauf die Genehmigung erteilt wurde, im Jahr 2024 mit dem endgültigen Entwurf und der Herstellung fortzufahren.
Frühere Informationen über die Mars-Drohne der NASA und die Dragonfly finden sich in der Jahresübersicht 2017.
Die im Jahr 2017 von Thor I. Fossen gegründete
Firma Scout Drone Inspection AS (ScoutDI) in Trondheim,
eine Ausgründung der Technisch-Naturwissenschaftlichen Universität Norwegens
(NTNU), bringt im März 2021 eine besonders robuste Drohne
für die Inspektion von Tanks auf den Markt.

Die flüssigkeitsführenden Tanks auf Tankschiffen müssen regelmäßig auf Risse und Lecks untersucht werden – eine Aufgabe, die normalerweise von Menschen erledigt wird, die dafür in jeden Tank hinabsteigen und dann jede Wand von oben nach unten untersuchen. Dazu müssen sie unter Umständen Gerüste aufstellen, Kletterseile verwenden oder mit einem Schlauchboot auf dem Wasser im Tank schwimmen.
Das norwegische Start-Up bietet mit der Drohne Scout 137 eine Alternative, die diese Aufgabe viel schneller und gründlicher erledigt. Hierzu ist der 3,2 kg schwere Quadrokopter mit einer 4K-Videokamera, einem LiDAR-Modul zur Kartierung und Hindernisvermeidung sowie sechs LED-Scheinwerfern ausgestattet, die zusammen mehr als 10.000 Lumen abstrahlen.
Die Echtzeit-Videobilder werden von der Drohne über eine 40 m lange Leine, die aus dem Tank herausführt, an die Bodenstation übertragen, wobei die Leine das Fluggerät auch mit Steuersignalen sowie mit Strom versorgt, so daß die Akkulaufzeit kein Problem darstellt. Während des Fluges erstellt die Drohne für die Reparaturteams eine digitale 3D-Karte des Tankinneren, auf welcher die Position von Rissen oder anderen Fehlern markiert wird, die von dem Bediener oder der Bildanalysesoftware entdeckt werden.
Nach Angaben des Unternehmens können so Inspektionen, die sonst Tage in Anspruch nehmen würden, in wenigen Stunden durchgeführt werden. Und in Zukunft soll der Scout auch autonom durch die Tanks fliegen können. Nachdem das Scout 137-Drohnensystem von Öl- und Gasunternehmen wie Equinor, Aker BP, DNV und Altera Infrastructure in der Praxis getestet worden ist, wird es jetzt an die ersten Unternehmenskunden ausgeliefert.
Im Juni berichtet die Fachpresse, daß in den Vereinigten Arabischen
Emiraten eine neue Methode zur Auslösung von Regen getestet
wird. Auf der Suche nach Alternativen für Süßwasser haben die Wissenschaftler
des UAE Program for Rain Enhancement Science etwa 12,5 Mio. $ in neun
Projekte aus verschiedenen Teilen der Welt investiert, die versuchen,
Regen zu erzeugen. Bei der jetzt untersuchten Methode werden kleine Fluggeräte
mit Autopiloten in den Himmel katapultiert, die dann die Wolken mit einer
elektrischen Ladung aufrütteln.
Die Idee, Wolken mit einer elektrischen Ladung zu beschießen, wurde 2017 von der britischen University of Reading vorgeschlagen und bereits im Vereinigten Königreich und in Finnland getestet. Ebenfalls schon seit 2017 wird in Dubai, wo die Sommerhitze Temperaturen von mehr als 50°C erreichen kann, auf die Cloud-Seeding-Technologie gesetzt (Wolkenkondensation). Dabei werden mit Flugzeugen Chemikalien wie Silberjodid in die Wolken geschossen, wodurch die Bildung von größeren Regentropfen forciert wird, so daß es zu mehr Niederschlägen kommt, als die im Schnitt 70 Liter pro Quadratmeter, die es in Dubai pro Jahr regnet.
Die nun angewandte Technologie basiert hingegen auf Drohnen, die bis in die in die Wolken aufsteigen und dort Laserstrahlen abfeuern, welche die feinen Wassertröpfchen elektrisch aufladen. Diese ballen sich dadurch zu größeren Tropfen zusammen, und es beginnt zu regnen. Der Wetterdienst in Dubai veröffentlicht zwei Videos, die den Effekt beweisen sollen: Starke Regengüsse gehen auf die Straßen der Stadt nieder.
Der Presse zufolge sind im Rahmen der Wetter-Versuche seit Jahresbeginn 126 Drohnenflüge mit dem Ziel der Wolkenimpfung durchgeführt worden. Bevor Dubai von Starkregen heimgesucht wurde, waren es demnach 14 Flüge, bei denen Drohnen die Niederschläge per ‚Elektroschock‘ erzwungen hätten.

Ebenso im Juni stellen die Blogs ein vom New Yorker Start-Up Reign
Maker (später: NixieDIP) entwickeltes System vor, das Drohnen
für die effizientere Beschaffung von Wasserproben nutzt.
Damit sollen Gemeinden, die regelmäßig die Verschmutzung lokaler Gewässer
überprüfen müssen, dies viel schneller, einfacher und billiger tun können
als bisher mittels Booten.
Das neue System besteht aus dem stangenförmigen Probennahmengerät namens Nixie Base mit einem Andockmechanismus an der Spitze und einer 500-ml-Wasserauffangflasche in einer verschließbaren Halterung an der Unterseite. Es ist für den Einsatz mit einer vom Kunden bereitgestellten und betriebenen DJI Matrice 600 oder Matrice 300 RTK Multikopter-Drohne konzipiert. Zum Betrieb muß die Nixie Base nur am Fahrgestell des Fluggeräts angebracht werden.
Danach wird die Drohne über das Gewässer geflogen, wobei die Basis senkrecht unter der Drohne herausragt. Der Pilot senkt dann das Fluggerät so ab, daß die Sammelflasche 0,6 m unter die Oberfläche getaucht wird. Danach fliegt er die Drohne einfach zurück zum Ufer, wo die volle Flasche entfernt und eine leere für die nächste Probe eingesetzt wird. Nach Angaben des Unternehmens kann jede Probe in weniger als drei Minuten gesammelt und zurückgebracht werden. Darüber hinaus verfolgt eine App die GPS-Koordinaten, an denen jede Probe entnommen wird, so daß nachfolgende Proben an genau denselben Stellen entnommen werden können.
Die Nixie Base kann ab sofort zum Preis von 850 $ vorbestellt werden - ein Advanced-Modell ist ebenfalls in Arbeit, das Wasserproben nicht nur sammelt, sondern auch gleich noch analysiert.

In gleichem Zusammenhang steht eine im Juni 2022 vorgestellte Dual-Roboter-Drohne, die sowohl durch die Luft fliegen als auch auf dem Wasser landen kann, um Proben zu sammeln und die Wasserqualität zu überwachen.
Das MEDUSA (Multi-Environment Dual robot for Underwater Sample Acquisition) genannte System, das ein Wissenschaftlerteam des Imperial College London, der Schweizer Eidgenössischen Materialprüfungs- und Forschungsanstalt (Empa) sowie der Eidgenössischen Anstalt für Wasserversorgung, Abwasserreinigung und Gewässerschutz (Eawag) entwickelt hat, wird erfolgreich getestet, indem es Wasser in Seen auf Anzeichen von Mikroorganismen und Algenblüten untersucht, die eine Gefahr für die menschliche Gesundheit darstellen können.
Das Team unter der Leitung von Prof. Mirko Kovac - der uns bereits mit der Entwicklung eines Sitzmechanismus für Mikro-Luftfahrzeuge (2010), einer 3D-Drucker-Drohne (2014), einer Drohne namens AquaMav, die die Flügel einfalten und ins Wasser eintauchen kann (2016), sowie der Buildrone bekannt geworden ist, die Lecks in Pipelines erkennen und auch reparieren kann (2016), und die später zu dem BuilDrones-System weiterentwickelt wird, das aus einer 3D-Drucker-Drohne und einer Kontroll- und Steuerdrohne besteht (2018) - nutzt für MEDUSA einen Hexakopter, der große Entfernungen mit hoher Nutzlast zurücklegen kann.
Bei ihren Einsätzen fliegt die Drohne zu einem schwer zugänglichen Gewässer, landet auf dem Wasser und läßt dann an einer gelben Leine eine zylindrisch Unterwasserkapsel mit Kamera und Sensoren bis zu einer Tiefe von 10 m ab. Nach der Probenahme wird die Leine wieder aufgerollt, um die Kapsel mit der Drohne zu verbinden, bevor sie abhebt und zum Benutzer zurückfliegt.
Die Drohne könnte in Zukunft gut zur Überwachung und Wartung von Offshore-Infrastrukturen wie Unterwasser-Energiepipelines und schwimmenden Windkraftanlagen beitragen – und ebenso zur Kontrolle von Klimahinweisen wie Temperaturänderungen in arktischen Meeren eingesetzt werden.
Bereits im März 2022 war Kovac zudem ein Consolidator Grant des European Research Council (ERC) zugesprochen worden, um gemeinsam mit internationalen Partnern formwandelnde metamorphe Drohnen zu entwickeln. Mit einer Finanzierung von bis zu 2 Mio. € für einen Zeitraum von fünf Jahren wird bereits an der Entwicklung einer multimodalen Drohne gearbeitet, die unter dem Namen ProteusDrone eine Fortbewegung in der Luft, im Wasser und auf der Wasseroberfläche erlaubt.

Über eine ähnliche Art der Umweltkontrolle wird im November berichtet.
Allerdings hat die Drohne in diesem Fall eine ‚elektronische Nase‘
(e-nose) zur Geruchsmessung in Kläranlagen, was bislang
durch menschliche Teilnehmer erfolgt, die an Luftsäcken riechen, welche
in den Anlagen aufgefangen wurden. Bei diesem Verfahren müssen die
Beutel nicht nur manuell befüllt werden, auch ist es ein äußerst subjektives
Verfahren, da die Fähigkeit, verschiedene Gerüche zu erkennen, von
Person zu Person unterschiedlich ist.
Unter der Leitung von Prof. Santiago Marco entwickeln Wissenschaftler des spanischen Institute for Bioengineering of Catalonia (IBEC) daher ein RHINOS (Real-time HIgh-speed e-NOSe) genantes Gerät, das eine Reihe von Gassensoren und auf künstlicher Intelligenz basierende Algorithmen nutzt, um den Gehalt an unangenehm riechenden Chemikalien wie Schwefeldioxid, Ammoniak und Schwefelwasserstoff in der Luft zu erkennen und zu messen.
Für ihren Einsatz befestigen die Forscher die 1,3 kg schwere e-nose an einer Multikopter-Drohne, die dann über eine Kläranlage geflogen wird und an verschiedenen Stellen über ein 10 m langes Probenahmerohr Luft ansaugt. So kann das System feststellen, welche übel riechenden Verbindungen von welchen Teilen der Anlage in welchen Mengen emittiert wurden. Und indem die e-nose die Proben über einen Zeitraum von sechs Monaten sammelt und analysiert, ist es sogar möglich, vorherzusagen, wie sich die Geruchsemissionen des Werks im Laufe der Zeit verändern könnten.
Als nächstes soll das Gerät noch weiter validiert und für den realen Betrieb in einer Anlage robuster gemacht werden. Es könnte in Zukunft auch bei anderen Einrichtungen zum Einsatz kommen, wie Mülldeponien, Kompostieranlagen oder sogar große landwirtschaftliche Betriebe mit Rindern und Schweinen, die ebenfalls alle Arten von schlechten Gerüchen produzieren. Die entsprechende Studie ist im Netz einsehbar (‚RHINOS: A lightweight portable electronic nose for real-time odor quantification in wastewater treatment plants‘).
Im Juli 2021 startet das vom Forschungszentrum für landwirtschaftliche
Fernerkundung (FLF) am Julius Kühn-Institut (JKI) koordinierte
und bis Ende Oktober 2023 vom Bundesministerium für
Ernährung und Landwirtschaft (BMEL) mit ca. 1,3 Mio. € geförderte Verbundprojekt Standards4DroPhe,
das dazu beitragen soll, die Kreuzungsarbeiten in den Zuchtgärten, in
denen neue, optimierte Rapssorten entwickelt werden,
zu unterstützen.
Ziel des Vorhabens ist die praxisorientierte Entwicklung, Realisierung und Evaluierung eines standardisierten Arbeitsplans zur Durchführung und Auswertung von digitalen Bilddaten, deren Erfassung durch optische Sensoren auf unbemannten Fluggeräten erfolgt. Kooperationspartner sind die Hochschule Osnabrück, das Bundessortenamt, die Gemeinschaft zur Förderung von Pflanzeninnovation e. V. (GFPi) und die Züchter NPZ, DSV, Euralis und Syngenta.

(Grafik)
Einen sehr speziellen Drohneneinsatz, der bislang aber erst als Konzept
existiert, bildet das futuristische NEBO EV Charging Network der
Designer Junpyo Hong, Jayoung Koo, Yang
Dong Wook und Dongjae Koo aus Seoul, das
die räumlichen und zeitlichen Beschränkungen von Ladestationen für
Elektromobile überwinden soll.
Das im Juli in den Fachblogs vorgestellte NEBO-System nutzt mehrere Drohnen, die speziell dafür entwickelt wurden, die Fahrzeuge kabellos aufzuladen, während sie unterwegs sind. Jede Ladedrohne ist mit elektromagnetischen und Ultraschallsensoren ausgestattet, um die Dächer der Elektrofahrzeugen zu orten, die sie über eine App angefordert haben und sich dort einzuklinken. Sobald sie sicher auf dem Elektrofahrzeug positioniert ist, übertragen Ladespulen den mitgebrachten Strom zu dem Elektrofahrzeug.
Im September 2021 erhält die Firma Beagle Systems GmbH den Hamburger Gründerpreis für ihr Netzwerk von Langstreckendrohnen und zugehörigen Ladestationen, das erstmals auf der Intergeo 2022 im Oktober in Essen vorgestellt wird. Ziel des 2019 gegründeten Drohnen-Start-Ups ist es, ein eigenes, bundesweites Netz aus insgesamt 20 Stationen mit Start- und Landeplätzen aufzubauen. Der erste Hangar wird Ende 2021 im niedersächsischen Hanstedt in der Lüneburger Heide errichtet.

Beagle Systems
Das Unternehmens ist spezialisiert auf Langstreckenflüge mit selbst entwickelten unbemannten Flugsystemen zur Inspektion und Überwachung großer Infrastrukturanlagen. Die Drohne Beagle M hat eine Spannweite von 2,50 m und kann eine Ladung von bis zu 3 kg transportieren. Als Start- und Landeplatz sowie für das Aufladen dient der ebenfalls selbst entwickelte Hangar, der 2,5 x 3,5 m groß ist.
Im Oktober 2022 sind bereits an drei Orten in Deutschland Hangars eingerichtet, auf denen die Drohnen landen, aufgeladen werden und für den nächsten Einsatz bereitstehen. Das Besondere ist, daß die Drohnenflüge komplett von Hamburg aus gesteuert werden, Personaleinsatz vor Ort ist somit nicht mehr erforderlich.
Um zukünftig besser in besonders gefährlichen Umgebungen manövrieren
und agieren zu können, findet im Oktober 2021 zum dritten
Mal der Wettbewerb EnRicH statt – im weltweit einzigen
AKW, das niemals in Betrieb gegangen ist, dem Reaktor im österreichischen
Zwentendorf. Wie bei den beiden Vorgänger-Wettbewerben 2017 und 2019 geht
es darum, mögliche Roboteranwendungen für radiologische und nukleare
Aufgaben zu bewerten.
In diesem Jahr sind aber zum ersten Mal auch Drohnen dabei, um bei der Suche nach Strahlungsquellen zu helfen. Hier ist die Traglast begrenzt, um die nötige Sensorik und Rechenleistung unterzubringen. Die Drohne des Teams des US-amerikanischen Southwest Research Institute beispielsweise hat eine Nutzlastkapazität von 1,5 kg, was ausreicht, um die 900 g schwere Ausrüstung unterzubringen. Die im 42 m hohen Schacht in einer Röhre versteckte Strahlungsquelle kann damit in 21 m Höhe zuverlässig detektiert werden, was dem Team den ersten Platz einbringt.

Gleichfalls im Oktober startet an der Universität Ulm und
der Friedrich-Alexander-Universität Erlangen-Nürnberg (FAU)
ein neues Graduiertenkolleg ‚Kooperative Apertursynthese für Radar-Tomographie‘
(KoRaTo), das von der Deutsche Forschungsgemeinschaft (DFG) mit rund
2,8 Mio. € gefördert wird und in den kommenden viereinhalb Jahren neue
Konzepte der Radarfernerkundung für die Geowissenschaften
entwickeln soll.
Geplant ist, daß in Zukunft Drohnenschwärme mit vernetzter Radarsensorik unzugängliche und unsichtbare Bodenstrukturen mit höchster Auflösung abbilden oder Daten für Klimamodelle erfassen. Von solchen dreidimensionalen Aufnahmen würden verschiedenste Forschungsbereiche profitieren – sofern es gelingt, die Einzelbilder der Flugroboter effizient zusammenzuführen.
Bislang wurde die Erforschung von Erdmassenbewegungen, Vegetationshöhen oder der Kryosphäre mittles Radarsystemen an Fahrzeugen, Flugzeugen oder Satelliten durchgeführt, was mit verschiedenen Einschränkungen verbunden war: Meßaufgaben an abgelegenen Orten können von Bodenfahrzeuge oft nicht ausgeführt werden, während Flugzeuge hohe Betriebskosten haben und die Flugbahnen von Satelliten unabänderlich festgelegt sind.
Viele dieser Einschränkungen können durch untereinander vernetzte, mit Radartechnik ausgestattete Drohnen überwunden werden, weshalb der neuartige kooperative Apertursyntheseansatz eine völlig neue Qualität der Erdbeobachtung verspricht.

Zeitgleich wird über das Projekt FALKE berichtet, das
vom Bundesministerium für Bildung und Forschung mit 2,3 Mio. € gefördert
wird. Entwickelt wird es von einem interdisziplinären Konsortium unter
Koordination der Docs in Clouds GmbH. Dazu gehören neben
der Ruhr-Universität Bochum (RUB) die flyXdrive GmbH, die IMST GmbH und
die Rheinisch-Westfälische Technische Hochschule Aachen. Unterstützt
wird das Konsortium vom AcuteCare InnovationHub der Klinik für Anästhesiologie
an der Uniklinik RWTH Aachen.
Konkret geht es darum, daß bei einem Massenanfall an Verletzten, z.B. bei Hochwasser, einer Explosion oder einem Bahnunglück, die Rettungskräfte im anfänglichen Chaos durch ein unbemanntes Flugsystem unterstützt werden, indem der FALKE aus der Luft Vitalparameter wie Herz- und Atemfrequenz von Betroffenen und Verletzten mißt. So kann er Einsatzkräften Entscheidungen erleichtern und die Versorgung beschleunigen.
Das Team der RUB nutzt hochauflösende Radarsensoren, um anhand der Körpervibration der Patienten ihren Herzschlag und ihre Atmung zu rekonstruieren. Darüber hinaus verfügt der FALKE über eine konventionelle Kamera zur Erkennung von Farbveränderungen und Bewegungen sowie über die Infrarotthermographie zur Erkennung von Temperaturunterschieden.

Digitalmikros
Der Meinung, daß der Einsatz von Mikrofonen auf Rettungsdrohnen
heute nicht möglich sei, widerspricht die Forscherin Macarena
Varela am Fraunhofer-Institut für Kommunikation, Informationsverarbeitung
und Ergonomie (FKIE), die mit ihren Versuchen derzeit das Gegenteil
beweist, wie im November 2021 berichtet wird.
Ihre mit Mikrofon-Arrays ausgestatteten Flugdrohnen blenden Wind- und Rotorgeräusche aus und nehmen dann akkurat Signale aus der Umgebung auf. Das Entwicklungsziel sind Drohnen, die z.B. in Katastrophengebieten Hilferufe, Klatschen oder Klopfen automatisch erfassen und die Position der Geräuschquelle orten.
Nach ersten Ansätzen mit kleinen unbemannten Kettenfahrzeugen, die mehrere analoge Mikrofone und einem Bordrechner tragen, sowie Mikrofonkonfigurationen für den Einsatz an Helikoptern, die alle relativ schwer sind, bieten die neuen digitalen MEMS-Mikrofone (Micro electro-mechanical systems), die wenig Energie und keine weitere Signalkonvertierung benötigen, die Möglichkeit, viel leichtgewichtigere Systeme aufbauen. Damit ist eine Erkennung von Schallsignalen auch mit kleinen Drohnen im Flug möglich.
Für die Anordnung der Mikrofonkonfigurationen aus inzwischen 64 MEMS-Mikrofonen nutzen die Forscher eine Entwicklung ihres Instituts aus der Radarortung, das sogenannte Crow’s Nest Array (CNA). Der Name bezieht sich auf den Ausguck am höchsten Mast alter Segelschiffe, das sogenannte Krähennest. Von dort aus hat ein Beobachter freie Sicht in alle Richtungen, und auch Sensoren in CNA-Konfiguration erkennen Signale aus allen Richtungen gleich gut. Dieser Aufbau umfaßt im Durchmesser nur noch etwa 15 cm und wiegt zusammen mit einer Recheneinheit weniger als 1,5 kg.
Den Rotorenlärm selbst kann ein Bandpassfilter vor der Geräuschdetektion effizient ausblenden. Diese Störgeräusche, aber auch Windrauschen bestimmt der Bordrechner binnen weniger Millisekunden und füttert dann den Filter mit den dazugehörigen Frequenzen. Entscheidend ist außerdem die sichere Erkennung von Zielgeräuschen. Eine KI soll dabei unterstützen, Hilferufe oder Impulsgeräusche wie etwa Klatschen und Klopfen abzugrenzen von Vogelstimmen oder einem plätschernden Bach. Derzeit bauen die Forscher eine Datenbank auf, mit Beispielen für typische Alarmsignale, Hilfeschreie und andere Impulsgeräusche.

per Drohne
Ein sehr sinnvoller neuer Einsatzbereich für Drohnen soll das Problem
lösen, daß die Oberflächen von Solarmodulen mit der Zeit verschmutzen
und der Ertrag sich entsprechend verringert, wenn nicht mehr genug
Sonnenlicht auf die PV-Anlage fällt. Dabei erweist sich das Putzen
oft als schwierig, vor allem bei großen Farmen und bei schwer erreichbaren
Modulen.
Die beiden israelischen Firmen, der Drohnenhersteller Airobotics und das Solardienstleistungsunternehmen Solar Drone, stellen im Dezember 2021 eine vollautomatisches Säuberungssystem vor, zu dem eine Docking-Station mit Drohne gehört, die nicht nur putzen kann, sondern sich auch selbst mit allem Nötigen versorgt. Über die Airobotics und ihre Technologie habe ich bereits in der Jahresübersicht 2016 berichtet.
Der Quadrokopter parkt in einer wetterfesten Garage in der Nähe der zu putzenden Anlage. Wenn eine Säuberungsaktion ansteht, klappt die Box oben auf und die Drohne fliegt heraus. Sie manövriert sich mit LiDAR-Sensoren und einem On-Board-Kamerasystem zu den Solarmodulen, um die Flächen mit einem speziellen Putzmittel zu bearbeiten und Vogeldreck, Staub, Matsch und anderen Schmutz zu entfernen.
Zurück in der Docking-Station tauscht die Drohne bei Bedarf ihren leeren Akku gegen einen vollständig geladenen aus. Außerdem ist das Gerät in der Lage, den Reinigungsmittelbehälter zu wechseln. Der Preis für das Gerät samt Zubehör steht noch nicht fest.
Zur Erinnerung: Die im Jahr 2014 in London gegründete Firma Aerial Power Ltd. hatte damals ebenfalls eine vollautomatische Drohnen-basierte Methode zur Reinigung von Solarpaneelen entwickelt, wobei die SolarBrush-Drohne – wie der Name schon sagt – auf direkter Berührung der Module basierte. Inzwischen ist man dort aber beim reinen ‚Wegpusten‘ angekommen.

Um im Kontext zu bleiben: Ein weiteres Drohnen-System zur PV-Module-Reinigung
wird im März 2022 in den Blogs vorgestellt. Die Innovation
namens Helios des 2019 gegründeten
belgischen Start-Ups ART Robotics aus Herent besteht
darin, die beiden bisherigen Ansätze – sprühende Drohnen bzw. spezielle
Reinigungsroboter – miteinander zu kombinieren.
Das Resultat ist eine Drohne, die einen Reinigungsroboter transportiert, wobei der Hexakopter nur einmal gestartet werden muß und dann selbständig zu den zu reinigenden Modulen findet. Dort setzt er den gummibereiften Roboter aus, der die Module mit Hilfe einer rotierenden Bürste und eines Saugers reinigt. Während dieses Vorgangs kehrt die Drohne auf den Boden zurück, um die Akkus zu schonen.
Hat der Roboter das gesamte Modul Bahn für Bahn von Dreck und Staub befreit, sendet er ein Signal an die Drohne, wird wieder abgeholt und auf einem benachbarten Solarpaneel abgesetzt. Oder bei abgeschlossener Arbeit zurück zum Boden gebracht. Es ist nicht geplant, das System an Privatleute zu verkaufen. Stattdessen sollen spezialisierte Helios-Operateure für die Wartung kleiner Hausdachinstallationen gebucht werden.
Nachdem die ART Robotics einen voll funktionsfähigen Prototypen vorzuweisen hat, wird auf Kickstarter eine Crowdfunding-Kampagne gestartet, um die Entwicklung eines kommerziellen Produkts zu ermöglichen. Die Finanzierung schlägt jedoch, da gerade einmal die Hälfte des Zielbetrags von 12.000 € erreicht wird. Über weitere Schritte ist bislang nichts bekannt.
Hinweis: Das Thema der PV-Paneele-Reinigung wird umfassend in einem eigenen Schwerpunkt in der Solarenergie-Jahresübersicht 2012 behandelt.
Weiter mit den Elektro- und Solarfluggeräten 2021 ...